 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeg2Change: Adapting Open-Vocabulary Semantic Segmentation Model for Remote Sensing Change Detection
Apr 13, 2026Change detection is a fundamental task in remote sensing, aiming to quantify the impacts of human activities and ecological dynamics on land-cover changes. Existing change detection methods are limited to predefined classes in training datasets, which constrains their scalability in real-world scenarios. In recent years, numerous advanced open-vocabulary semantic segmentation models have emerged for remote sensing imagery. However, there is still a lack of an effective framework for directly applying these models to open-vocabulary change detection (OVCD), a novel task that integrates vision and language to detect changes across arbitrary categories. To address these challenges, we first construct a category-agnostic change detection dataset, termed CA-CDD. Further, we design a category-agnostic change head to detect the transitions of arbitrary categories and index them to specific classes. Based on them, we propose Seg2Change, an adapter designed to adapt open-vocabulary semantic segmentation models to change detection task. Without bells and whistles, this simple yet effective framework achieves state-of-the-art OVCD performance (+9.52 IoU on WHU-CD and +5.50 mIoU on SECOND). Our code is released at https://github.com/yogurts-sy/Seg2Change.
CRMSP: A Semi-supervised Approach for Key Information Extraction with Class-Rebalancing and Merged Semantic Pseudo-Labeling
Jul 19, 2024There is a growing demand in the field of KIE (Key Information Extraction) to apply semi-supervised learning to save manpower and costs, as training document data using fully-supervised methods requires labor-intensive manual annotation. The main challenges of applying SSL in the KIE are (1) underestimation of the confidence of tail classes in the long-tailed distribution and (2) difficulty in achieving intra-class compactness and inter-class separability of tail features. To address these challenges, we propose a novel semi-supervised approach for KIE with Class-Rebalancing and Merged Semantic Pseudo-Labeling (CRMSP). Firstly, the Class-Rebalancing Pseudo-Labeling (CRP) module introduces a reweighting factor to rebalance pseudo-labels, increasing attention to tail classes. Secondly, we propose the Merged Semantic Pseudo-Labeling (MSP) module to cluster tail features of unlabeled data by assigning samples to Merged Prototypes (MP). Additionally, we designed a new contrastive loss specifically for MSP. Extensive experimental results on three well-known benchmarks demonstrate that CRMSP achieves state-of-the-art performance. Remarkably, CRMSP achieves 3.24% f1-score improvement over state-of-the-art on the CORD.
Actor-Director-Critic: A Novel Deep Reinforcement Learning Framework
Jan 10, 2023In this paper, we propose actor-director-critic, a new framework for deep reinforcement learning. Compared with the actor-critic framework, the director role is added, and action classification and action evaluation are applied simultaneously to improve the decision-making performance of the agent. Firstly, the actions of the agent are divided into high quality actions and low quality actions according to the rewards returned from the environment. Then, the director network is trained to have the ability to discriminate high and low quality actions and guide the actor network to reduce the repetitive exploration of low quality actions in the early stage of training. In addition, we propose an improved double estimator method to better solve the problem of overestimation in the field of reinforcement learning. For the two critic networks used, we design two target critic networks for each critic network instead of one. In this way, the target value of each critic network can be calculated by taking the average of the outputs of the two target critic networks, which is more stable and accurate than using only one target critic network to obtain the target value. In order to verify the performance of the actor-director-critic framework and the improved double estimator method, we applied them to the TD3 algorithm to improve the TD3 algorithm. Then, we carried out experiments in multiple environments in MuJoCo and compared the experimental data before and after the algorithm improvement. The final experimental results show that the improved algorithm can achieve faster convergence speed and higher total return.
SiamPolar: Semi-supervised Realtime Video Object Segmentation with Polar Representation
Oct 27, 2021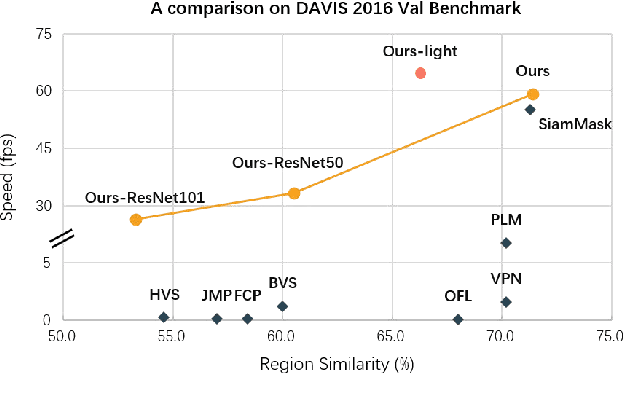
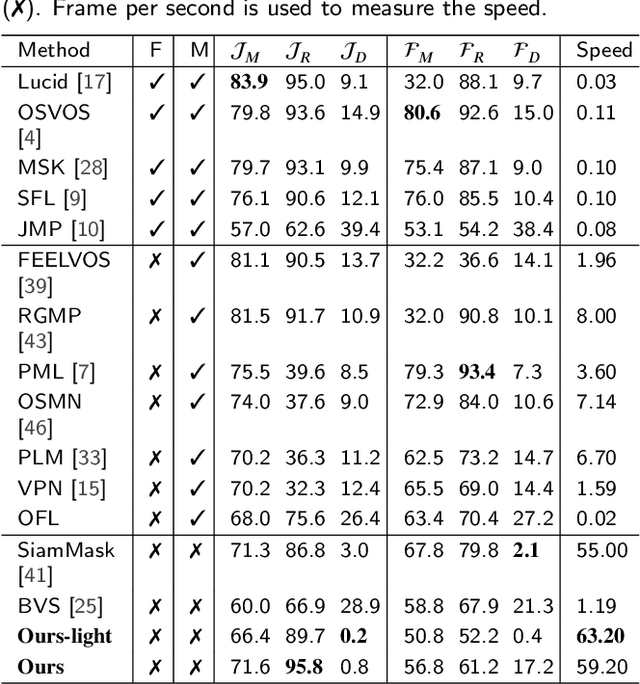
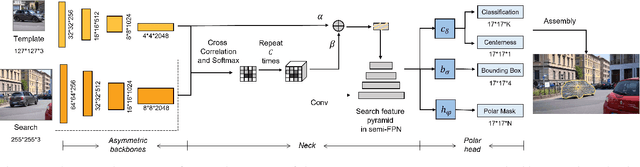
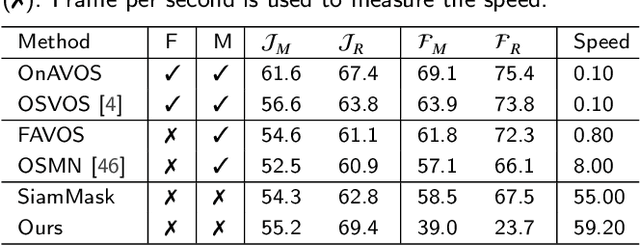
Video object segmentation (VOS) is an essential part of autonomous vehicle navigation. The real-time speed is very important for the autonomous vehicle algorithms along with the accuracy metric. In this paper, we propose a semi-supervised real-time method based on the Siamese network using a new polar representation. The input of bounding boxes is initialized rather than the object masks, which are applied to the video object detection tasks. The polar representation could reduce the parameters for encoding masks with subtle accuracy loss so that the algorithm speed can be improved significantly. An asymmetric siamese network is also developed to extract the features from different spatial scales. Moreover, the peeling convolution is proposed to reduce the antagonism among the branches of the polar head. The repeated cross-correlation and semi-FPN are designed based on this idea. The experimental results on the DAVIS-2016 dataset and other public datasets demonstrate the effectiveness of the proposed method.
* 11 pages, 11 figures, journal