 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSiamPolar: Semi-supervised Realtime Video Object Segmentation with Polar Representation
Paper and Code
Oct 27, 2021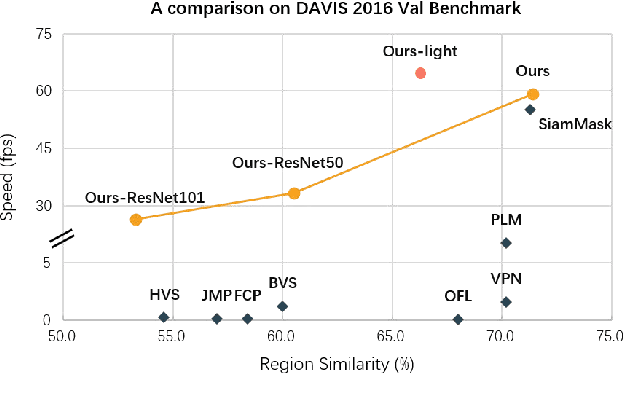
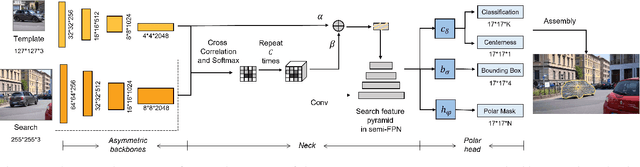
Video object segmentation (VOS) is an essential part of autonomous vehicle navigation. The real-time speed is very important for the autonomous vehicle algorithms along with the accuracy metric. In this paper, we propose a semi-supervised real-time method based on the Siamese network using a new polar representation. The input of bounding boxes is initialized rather than the object masks, which are applied to the video object detection tasks. The polar representation could reduce the parameters for encoding masks with subtle accuracy loss so that the algorithm speed can be improved significantly. An asymmetric siamese network is also developed to extract the features from different spatial scales. Moreover, the peeling convolution is proposed to reduce the antagonism among the branches of the polar head. The repeated cross-correlation and semi-FPN are designed based on this idea. The experimental results on the DAVIS-2016 dataset and other public datasets demonstrate the effectiveness of the proposed method.