 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR-based Outdoor Crowd Management for Smart Campus on the Edge
Nov 29, 2023
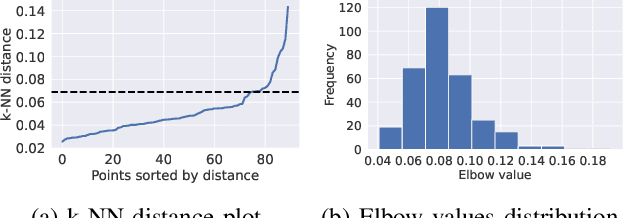
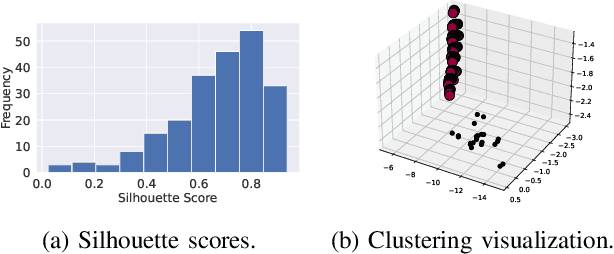

Crowd management is crucial for a smart campus. Popular methods are camera-based. However, conventional camera-based approaches may leak users' personally identifiable features, jeopardizing user's privacy, which limits its application. In this work, we investigate using affordable light detection and ranging (LiDAR) technology to perform outdoor crowd management leveraging edge computing. Specifically, we aim to count the number of people on a walkway of a university campus. Besides privacy protection, LiDAR sensors are superior to cameras since their performance will not be compromised when the campus is not well-illuminated. We deploy LiDAR sensors on light poles to collect data from the crowd on the campus and leverage edge accelerators to process data locally. We proposed two different methodologies in this work: 1) a non-convolutional neural network (CNN)-based approach, using clustering and autoencoder, and 2) a CNN-based approach that first projects point clouds to 2D planes and then processes the projection with conventional CNNs. Our first approach relies on careful feature engineering, whereas our second approach does not require such effort. However, the CNN-based approach requires more computational power than our non-CNN-based approach. We evaluate both approaches comprehensively with our hand-labeled real-life data collected from campus. Our evaluation results show that the first method achieves an accuracy of 85.4%, whereas the second method achieves 95.8%. Our CNN-based method outperforms existing solutions significantly. We also deploy our two models on an edge accelerator, TPU, to measure the speedup, leveraging this specialized accelerator.
Confidence-based federated distillation for vision-based lane-centering
Jun 05, 2023



A fundamental challenge of autonomous driving is maintaining the vehicle in the center of the lane by adjusting the steering angle. Recent advances leverage deep neural networks to predict steering decisions directly from images captured by the car cameras. Machine learning-based steering angle prediction needs to consider the vehicle's limitation in uploading large amounts of potentially private data for model training. Federated learning can address these constraints by enabling multiple vehicles to collaboratively train a global model without sharing their private data, but it is difficult to achieve good accuracy as the data distribution is often non-i.i.d. across the vehicles. This paper presents a new confidence-based federated distillation method to improve the performance of federated learning for steering angle prediction. Specifically, it proposes the novel use of entropy to determine the predictive confidence of each local model, and then selects the most confident local model as the teacher to guide the learning of the global model. A comprehensive evaluation of vision-based lane centering shows that the proposed approach can outperform FedAvg and FedDF by 11.3% and 9%, respectively.
A Contrastive Knowledge Transfer Framework for Model Compression and Transfer Learning
Mar 14, 2023Knowledge Transfer (KT) achieves competitive performance and is widely used for image classification tasks in model compression and transfer learning. Existing KT works transfer the information from a large model ("teacher") to train a small model ("student") by minimizing the difference of their conditionally independent output distributions. However, these works overlook the high-dimension structural knowledge from the intermediate representations of the teacher, which leads to limited effectiveness, and they are motivated by various heuristic intuitions, which makes it difficult to generalize. This paper proposes a novel Contrastive Knowledge Transfer Framework (CKTF), which enables the transfer of sufficient structural knowledge from the teacher to the student by optimizing multiple contrastive objectives across the intermediate representations between them. Also, CKTF provides a generalized agreement to existing KT techniques and increases their performance significantly by deriving them as specific cases of CKTF. The extensive evaluation shows that CKTF consistently outperforms the existing KT works by 0.04% to 11.59% in model compression and by 0.4% to 4.75% in transfer learning on various models and datasets.
Enabling Deep Learning on Edge Devices through Filter Pruning and Knowledge Transfer
Jan 22, 2022Deep learning models have introduced various intelligent applications to edge devices, such as image classification, speech recognition, and augmented reality. There is an increasing need of training such models on the devices in order to deliver personalized, responsive, and private learning. To address this need, this paper presents a new solution for deploying and training state-of-the-art models on the resource-constrained devices. First, the paper proposes a novel filter-pruning-based model compression method to create lightweight trainable models from large models trained in the cloud, without much loss of accuracy. Second, it proposes a novel knowledge transfer method to enable the on-device model to update incrementally in real time or near real time using incremental learning on new data and enable the on-device model to learn the unseen categories with the help of the in-cloud model in an unsupervised fashion. The results show that 1) our model compression method can remove up to 99.36% parameters of WRN-28-10, while preserving a Top-1 accuracy of over 90% on CIFAR-10; 2) our knowledge transfer method enables the compressed models to achieve more than 90% accuracy on CIFAR-10 and retain good accuracy on old categories; 3) it allows the compressed models to converge within real time (three to six minutes) on the edge for incremental learning tasks; 4) it enables the model to classify unseen categories of data (78.92% Top-1 accuracy) that it is never trained with.
Convergence of Generalized Belief Propagation Algorithm on Graphs with Motifs
Dec 11, 2021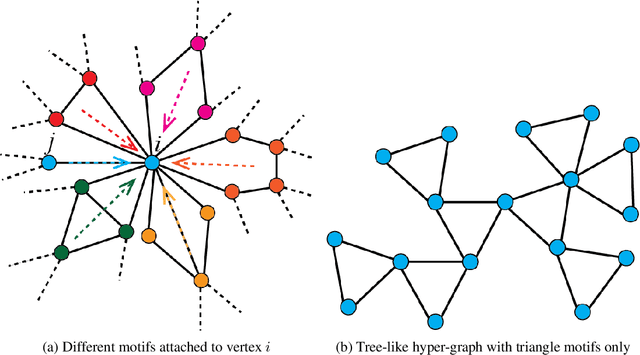
Belief propagation is a fundamental message-passing algorithm for numerous applications in machine learning. It is known that belief propagation algorithm is exact on tree graphs. However, belief propagation is run on loopy graphs in most applications. So, understanding the behavior of belief propagation on loopy graphs has been a major topic for researchers in different areas. In this paper, we study the convergence behavior of generalized belief propagation algorithm on graphs with motifs (triangles, loops, etc.) We show under a certain initialization, generalized belief propagation converges to the global optimum of the Bethe free energy for ferromagnetic Ising models on graphs with motifs.
Multi-Agent Decentralized Belief Propagation on Graphs
Nov 10, 2020We consider the problem of interactive partially observable Markov decision processes (I-POMDPs), where the agents are located at the nodes of a communication network. Specifically, we assume a certain message type for all messages. Moreover, each agent makes individual decisions based on the interactive belief states, the information observed locally and the messages received from its neighbors over the network. Within this setting, the collective goal of the agents is to maximize the globally averaged return over the network through exchanging information with their neighbors. We propose a decentralized belief propagation algorithm for the problem, and prove the convergence of our algorithm. Finally we show multiple applications of our framework. Our work appears to be the first study of decentralized belief propagation algorithm for networked multi-agent I-POMDPs.