 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREFINE-DP: Diffusion Policy Fine-tuning for Humanoid Loco-manipulation via Reinforcement Learning
Mar 14, 2026Humanoid loco-manipulation requires coordinated high-level motion plans with stable, low-level whole-body execution under complex robot-environment dynamics and long-horizon tasks. While diffusion policies (DPs) show promise for learning from demonstrations, deploying them on humanoids poses critical challenges: the motion planner trained offline is decoupled from the low-level controller, leading to poor command tracking, compounding distribution shift, and task failures. The common approach of scaling demonstration data is prohibitively expensive for high-dimensional humanoid systems. To address this challenge, we present REFINE-DP (REinforcement learning FINE-tuning of Diffusion Policy), a hierarchical framework that jointly optimizes a DP high-level planner and an RL-based low-level loco-manipulation controller. The DP is fine-tuned via a PPO-based diffusion policy gradient to improve task success rate, while the controller is simultaneously updated to accurately track the planner's evolving command distribution, reducing the distributional mismatch that degrades motion quality. We validate REFINE-DP on a humanoid robot performing loco-manipulation tasks, including door traversal and long-horizon object transport. REFINE-DP achieves an over $90\%$ success rate in simulation, even in out-of-distribution cases not seen in the pre-trained data, and enables smooth autonomous task execution in real-world dynamic environments. Our proposed method substantially outperforms pre-trained DP baselines and demonstrates that RL fine-tuning is key to reliable humanoid loco-manipulation. https://refine-dp.github.io/REFINE-DP/
Diffusion Policy Attacker: Crafting Adversarial Attacks for Diffusion-based Policies
May 29, 2024



Diffusion models (DMs) have emerged as a promising approach for behavior cloning (BC). Diffusion policies (DP) based on DMs have elevated BC performance to new heights, demonstrating robust efficacy across diverse tasks, coupled with their inherent flexibility and ease of implementation. Despite the increasing adoption of DP as a foundation for policy generation, the critical issue of safety remains largely unexplored. While previous attempts have targeted deep policy networks, DP used diffusion models as the policy network, making it ineffective to be attacked using previous methods because of its chained structure and randomness injected. In this paper, we undertake a comprehensive examination of DP safety concerns by introducing adversarial scenarios, encompassing offline and online attacks, and global and patch-based attacks. We propose DP-Attacker, a suite of algorithms that can craft effective adversarial attacks across all aforementioned scenarios. We conduct attacks on pre-trained diffusion policies across various manipulation tasks. Through extensive experiments, we demonstrate that DP-Attacker has the capability to significantly decrease the success rate of DP for all scenarios. Particularly in offline scenarios, DP-Attacker can generate highly transferable perturbations applicable to all frames. Furthermore, we illustrate the creation of adversarial physical patches that, when applied to the environment, effectively deceive the model. Video results are put in: https://sites.google.com/view/diffusion-policy-attacker.
Robust-Locomotion-by-Logic: Perturbation-Resilient Bipedal Locomotion via Signal Temporal Logic Guided Model Predictive Control
Mar 24, 2024
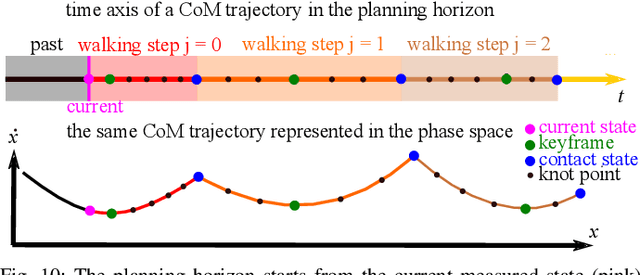


This study introduces a robust planning framework that utilizes a model predictive control (MPC) approach, enhanced by incorporating signal temporal logic (STL) specifications. This marks the first-ever study to apply STL-guided trajectory optimization for bipedal locomotion, specifically designed to handle both translational and orientational perturbations. Existing recovery strategies often struggle with reasoning complex task logic and evaluating locomotion robustness systematically, making them susceptible to failures caused by inappropriate recovery strategies or lack of robustness. To address these issues, we design an analytical robustness metric for bipedal locomotion and quantify this metric using STL specifications, which guide the generation of recovery trajectories to achieve maximum locomotion robustness. To enable safe and computational-efficient crossed-leg maneuver, we design data-driven self-leg-collision constraints that are $1000$ times faster than the traditional inverse-kinematics-based approach. Our framework outperforms a state-of-the-art locomotion controller, a standard MPC without STL, and a linear-temporal-logic-based planner in a high-fidelity dynamic simulation, especially in scenarios involving crossed-leg maneuvers. Additionally, the Cassie bipedal robot achieves robust performance under horizontal and orientational perturbations such as those observed in ship motions. These environments are validated in simulations and deployed on hardware. Furthermore, our proposed method demonstrates versatility on stepping stones and terrain-agnostic features on inclined terrains.
Signal Temporal Logic-Guided Model Predictive Control for Robust Bipedal Locomotion Resilient to Runtime External Perturbations
Oct 17, 2023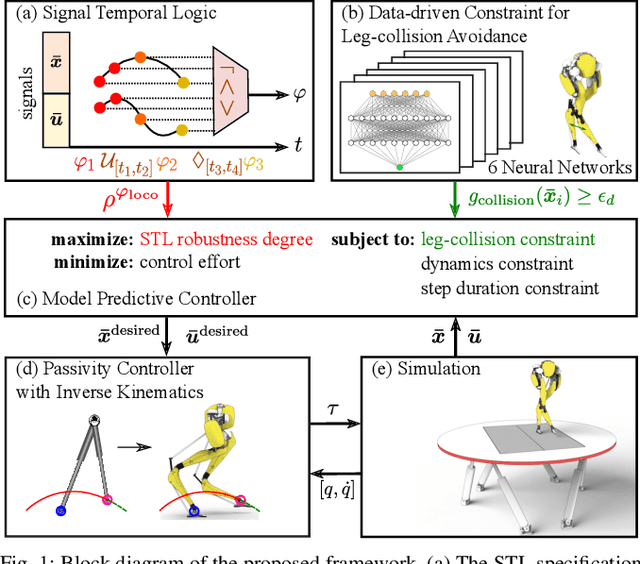


This study investigates formal-method-based trajectory optimization (TO) for bipedal locomotion, focusing on scenarios where the robot encounters external perturbations at unforeseen times. Our key research question centers around the assurance of task specification correctness and the maximization of specification robustness for a bipedal robot in the presence of external perturbations. Our contribution includes the design of an optimization-based task and motion planning framework that generates optimal control sequences with formal guarantees of external perturbation recovery. As a core component of the framework, a model predictive controller (MPC) encodes signal temporal logic (STL)-based task specifications as a cost function. In particular, we investigate challenging scenarios where the robot is subjected to lateral perturbations that increase the risk of failure due to leg self-collision. To address this, we synthesize agile and safe crossed-leg maneuvers to enhance locomotion stability. This work marks the first study to incorporate formal guarantees offered by STL into a TO for perturbation recovery of bipedal locomotion. We demonstrate the efficacy of the framework via perturbation experiments in simulations.
Walking-by-Logic: Signal Temporal Logic-Guided Model Predictive Control for Bipedal Locomotion Resilient to External Perturbations
Sep 22, 2023



This study proposes a novel planning framework based on a model predictive control formulation that incorporates signal temporal logic (STL) specifications for task completion guarantees and robustness quantification. This marks the first-ever study to apply STL-guided trajectory optimization for bipedal locomotion push recovery, where the robot experiences unexpected disturbances. Existing recovery strategies often struggle with complex task logic reasoning and locomotion robustness evaluation, making them susceptible to failures caused by inappropriate recovery strategies or insufficient robustness. To address this issue, the STL-guided framework generates optimal and safe recovery trajectories that simultaneously satisfy the task specification and maximize the locomotion robustness. Our framework outperforms a state-of-the-art locomotion controller in a high-fidelity dynamic simulation, especially in scenarios involving crossed-leg maneuvers. Furthermore, it demonstrates versatility in tasks such as locomotion on stepping stones, where the robot must select from a set of disjointed footholds to maneuver successfully.