 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSignal Temporal Logic-Guided Model Predictive Control for Robust Bipedal Locomotion Resilient to Runtime External Perturbations
Paper and Code
Oct 17, 2023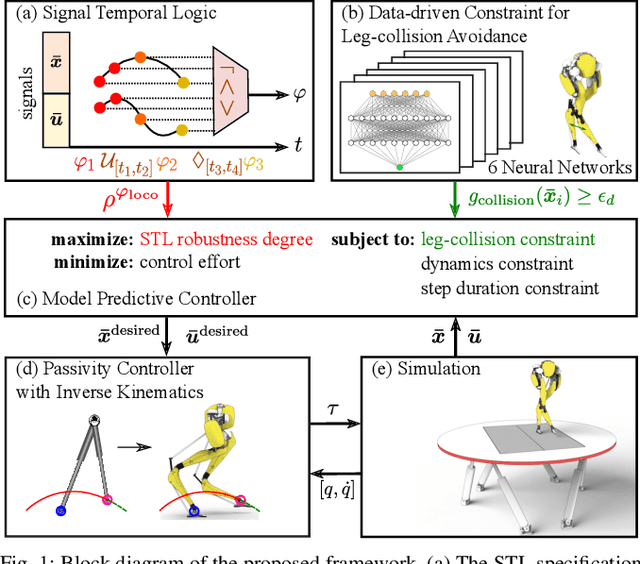


This study investigates formal-method-based trajectory optimization (TO) for bipedal locomotion, focusing on scenarios where the robot encounters external perturbations at unforeseen times. Our key research question centers around the assurance of task specification correctness and the maximization of specification robustness for a bipedal robot in the presence of external perturbations. Our contribution includes the design of an optimization-based task and motion planning framework that generates optimal control sequences with formal guarantees of external perturbation recovery. As a core component of the framework, a model predictive controller (MPC) encodes signal temporal logic (STL)-based task specifications as a cost function. In particular, we investigate challenging scenarios where the robot is subjected to lateral perturbations that increase the risk of failure due to leg self-collision. To address this, we synthesize agile and safe crossed-leg maneuvers to enhance locomotion stability. This work marks the first study to incorporate formal guarantees offered by STL into a TO for perturbation recovery of bipedal locomotion. We demonstrate the efficacy of the framework via perturbation experiments in simulations.