 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection and Utilization of Reflections in LiDAR Scans Through Plane Optimization and Plane SLAM
Jun 15, 2024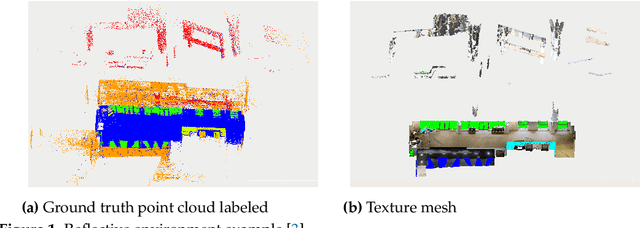
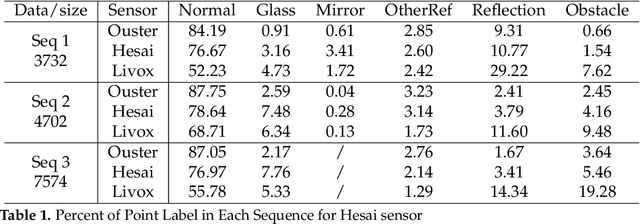

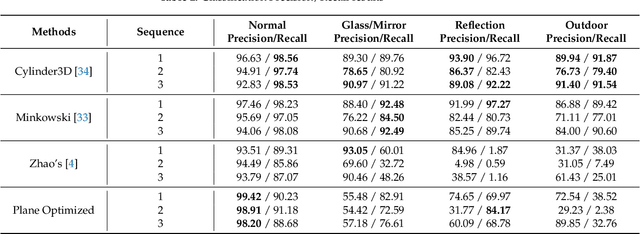
In LiDAR sensing, glass, mirrors and other material often cause inconsistent data readings, because the laser beams may report the distance of the glass, the distance of the object behind the glass or the distance to a reflected object. This causes problems in robotics and 3D reconstruction, especially with respect to localization, mapping and thus navigation. With dual-return LiDARs and other methods, one can detect the glass plane and classify the points in a single scan. In this work we go one step further and construct a global, optimized map of reflective planes, in order to then classify all LiDAR readings at the end. As our experiments will show, this approach provides superior classification accuracy compared to the single scan approach. The code and data for this work are available as open source online.
The SLAM Hive Benchmarking Suite
Mar 21, 2023



Benchmarking Simultaneous Localization and Mapping (SLAM) algorithms is important to scientists and users of robotic systems alike. But through their many configuration options in hardware and software, SLAM systems feature a vast parameter space that scientists up to now were not able to explore. The proposed SLAM Hive Benchmarking Suite is able to analyze SLAM algorithms in 1000's of mapping runs, through its utilization of container technology and deployment in a cluster. This paper presents the architecture and open source implementation of SLAM Hive and compares it to existing efforts on SLAM evaluation. Furthermore, we highlight the function of SLAM Hive by exploring some open source algorithms on public datasets in terms of accuracy. We compare the algorithms against each other and evaluate how parameters effect not only accuracy but also CPU and memory usage. Through this we show that SLAM Hive can become an essential tool for proper comparisons and evaluations of SLAM algorithms and thus drive the scientific development in the research on SLAM.