 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOccupancy-SLAM: An Efficient and Robust Algorithm for Simultaneously Optimizing Robot Poses and Occupancy Map
Feb 10, 2025Joint optimization of poses and features has been extensively studied and demonstrated to yield more accurate results in feature-based SLAM problems. However, research on jointly optimizing poses and non-feature-based maps remains limited. Occupancy maps are widely used non-feature-based environment representations because they effectively classify spaces into obstacles, free areas, and unknown regions, providing robots with spatial information for various tasks. In this paper, we propose Occupancy-SLAM, a novel optimization-based SLAM method that enables the joint optimization of robot trajectory and the occupancy map through a parameterized map representation. The key novelty lies in optimizing both robot poses and occupancy values at different cell vertices simultaneously, a significant departure from existing methods where the robot poses need to be optimized first before the map can be estimated. Evaluations using simulations and practical 2D laser datasets demonstrate that the proposed approach can robustly obtain more accurate robot trajectories and occupancy maps than state-of-the-art techniques with comparable computational time. Preliminary results in the 3D case further confirm the potential of the proposed method in practical 3D applications, achieving more accurate results than existing methods.
Occupancy-SLAM: Simultaneously Optimizing Robot Poses and Continuous Occupancy Map
May 17, 2024



In this paper, we propose an optimization based SLAM approach to simultaneously optimize the robot trajectory and the occupancy map using 2D laser scans (and odometry) information. The key novelty is that the robot poses and the occupancy map are optimized together, which is significantly different from existing occupancy mapping strategies where the robot poses need to be obtained first before the map can be estimated. In our formulation, the map is represented as a continuous occupancy map where each 2D point in the environment has a corresponding evidence value. The Occupancy-SLAM problem is formulated as an optimization problem where the variables include all the robot poses and the occupancy values at the selected discrete grid cell nodes. We propose a variation of Gauss-Newton method to solve this new formulated problem, obtaining the optimized occupancy map and robot trajectory together with their uncertainties. Our algorithm is an offline approach since it is based on batch optimization and the number of variables involved is large. Evaluations using simulations and publicly available practical 2D laser datasets demonstrate that the proposed approach can estimate the maps and robot trajectories more accurately than the state-of-the-art techniques, when a relatively accurate initial guess is provided to our algorithm. The video shows the convergence process of the proposed Occupancy-SLAM and comparison of results to Cartographer can be found at \url{https://youtu.be/4oLyVEUC4iY}.
* This paper has been accpeted by Robotics: Science and Systems 2022
Incorporating Lambertian Priors into Surface Normals Measurement
Jul 15, 2021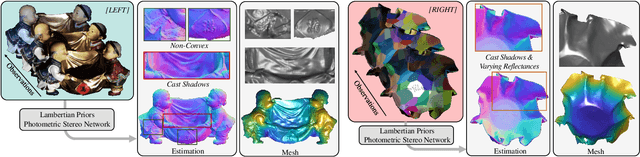
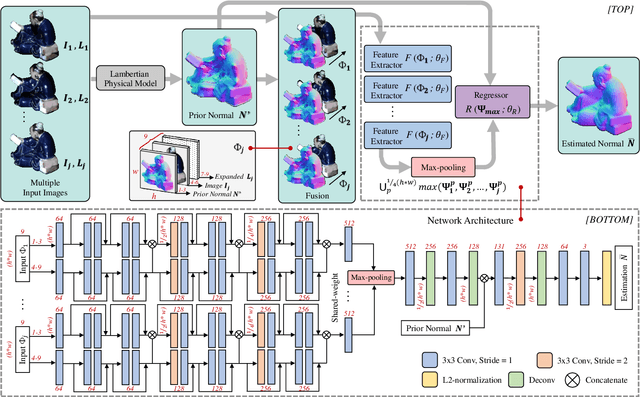
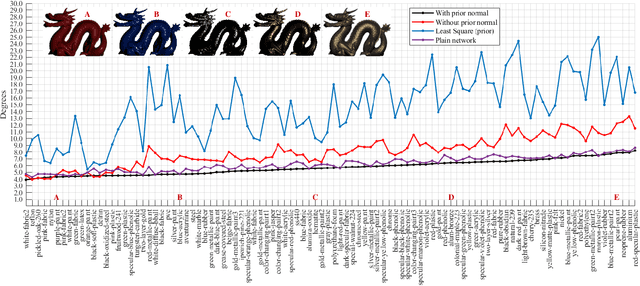
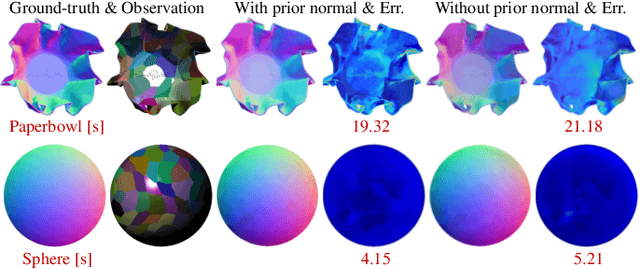
The goal of photometric stereo is to measure the precise surface normal of a 3D object from observations with various shading cues. However, non-Lambertian surfaces influence the measurement accuracy due to irregular shading cues. Despite deep neural networks have been employed to simulate the performance of non-Lambertian surfaces, the error in specularities, shadows, and crinkle regions is hard to be reduced. In order to address this challenge, we here propose a photometric stereo network that incorporates Lambertian priors to better measure the surface normal. In this paper, we use the initial normal under the Lambertian assumption as the prior information to refine the normal measurement, instead of solely applying the observed shading cues to deriving the surface normal. Our method utilizes the Lambertian information to reparameterize the network weights and the powerful fitting ability of deep neural networks to correct these errors caused by general reflectance properties. Our explorations include: the Lambertian priors (1) reduce the learning hypothesis space, making our method learn the mapping in the same surface normal space and improving the accuracy of learning, and (2) provides the differential features learning, improving the surfaces reconstruction of details. Extensive experiments verify the effectiveness of the proposed Lambertian prior photometric stereo network in accurate surface normal measurement, on the challenging benchmark dataset.