 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Algorithms and Policies Using Adaptive and Machine Learning Approaches
May 27, 2021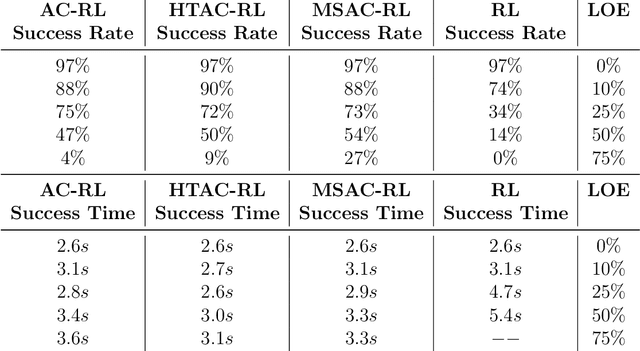
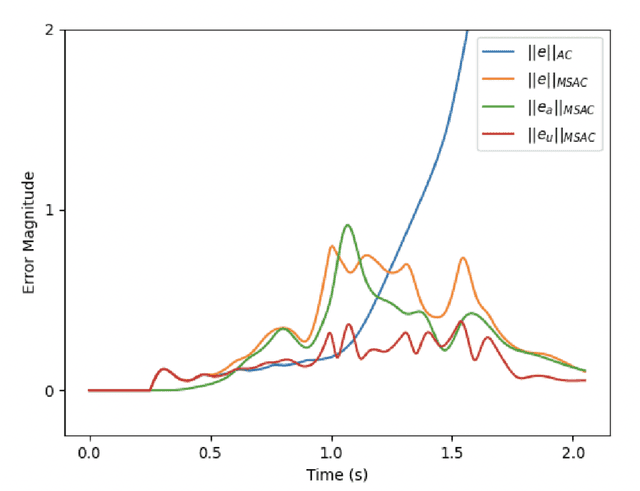
This paper considers the problem of real-time control and learning in dynamic systems subjected to uncertainties. Adaptive approaches are proposed to address the problem, which are combined to with methods and tools in Reinforcement Learning (RL) and Machine Learning (ML). Algorithms are proposed in continuous-time that combine adaptive approaches with RL leading to online control policies that guarantee stable behavior in the presence of parametric uncertainties that occur in real-time. Algorithms are proposed in discrete-time that combine adaptive approaches proposed for parameter and output estimation and ML approaches proposed for accelerated performance that guarantee stable estimation even in the presence of time-varying regressors, and for accelerated learning of the parameters with persistent excitation. Numerical validations of all algorithms are carried out using a quadrotor landing task on a moving platform and benchmark problems in ML. All results clearly point out the advantage of adaptive approaches for real-time control and learning.
A New Algorithm for Discrete-Time Parameter Estimation
Mar 30, 2021


We propose a new discrete-time adaptive algorithm for parameter estimation of a class of time-varying plants. The main contribution is the inclusion of a time-varying gain matrix in the adjustment of the parameter estimates. We show that in the presence of time-varying unknown parameters, the parameter estimation error converges uniformly to a compact set under conditions of persistent excitation, with the size of the compact set proportional to the time-variation of the unknown parameters. Under conditions of finite excitation, the convergence is asymptotic and non-uniform.
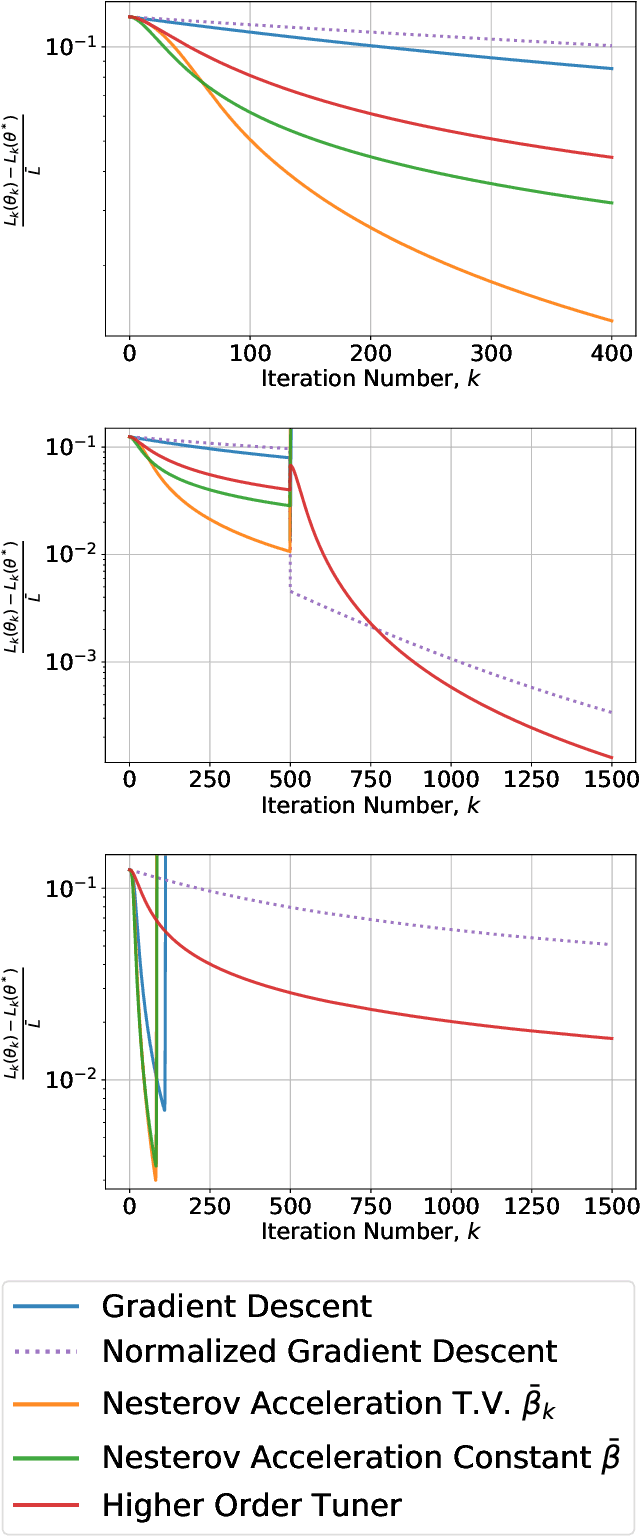
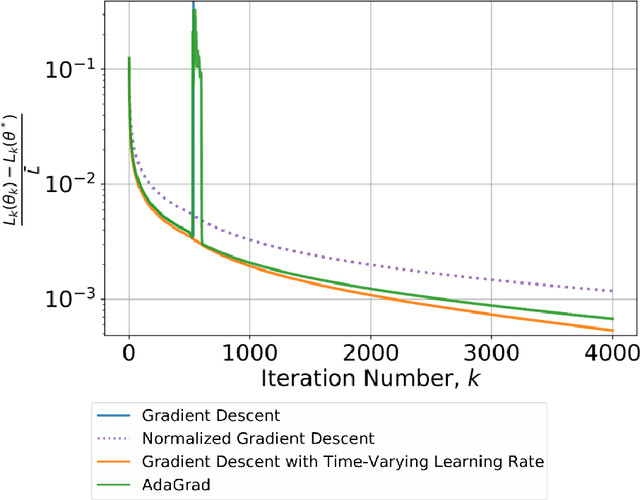
A High-order Tuner for Accelerated Learning and Control
Mar 23, 2021Gradient-descent based iterative algorithms pervade a variety of problems in estimation, prediction, learning, control, and optimization. Recently iterative algorithms based on higher-order information have been explored in an attempt to lead to accelerated learning. In this paper, we explore a specific a high-order tuner that has been shown to result in stability with time-varying regressors in linearly parametrized systems, and accelerated convergence with constant regressors. We show that this tuner continues to provide bounded parameter estimates even if the gradients are corrupted by noise. Additionally, we also show that the parameter estimates converge exponentially to a compact set whose size is dependent on noise statistics. As the HT algorithms can be applied to a wide range of problems in estimation, filtering, control, and machine learning, the result obtained in this paper represents an important extension to the topic of real-time and fast decision making.