 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLAW: A Vision-Language-Action Framework for Weight-Aware Robotic Grasping
Sep 17, 2025Vision-language-action (VLA) models have recently emerged as a promising paradigm for robotic control, enabling end-to-end policies that ground natural language instructions into visuomotor actions. However, current VLAs often struggle to satisfy precise task constraints, such as stopping based on numeric thresholds, since their observation-to-action mappings are implicitly shaped by training data and lack explicit mechanisms for condition monitoring. In this work, we propose CLAW (CLIP-Language-Action for Weight), a framework that decouples condition evaluation from action generation. CLAW leverages a fine-tuned CLIP model as a lightweight prompt generator, which continuously monitors the digital readout of a scale and produces discrete directives based on task-specific weight thresholds. These prompts are then consumed by $\pi_0$, a flow-based VLA policy, which integrates the prompts with multi-view camera observations to produce continuous robot actions. This design enables CLAW to combine symbolic weight reasoning with high-frequency visuomotor control. We validate CLAW on three experimental setups: single-object grasping and mixed-object tasks requiring dual-arm manipulation. Across all conditions, CLAW reliably executes weight-aware behaviors and outperforms both raw-$\pi_0$ and fine-tuned $\pi_0$ models. We have uploaded the videos as supplementary materials.
SeqVLA: Sequential Task Execution for Long-Horizon Manipulation with Completion-Aware Vision-Language-Action Model
Sep 17, 2025Long-horizon robotic manipulation tasks require executing multiple interdependent subtasks in strict sequence, where errors in detecting subtask completion can cascade into downstream failures. Existing Vision-Language-Action (VLA) models such as $\pi_0$ excel at continuous low-level control but lack an internal signal for identifying when a subtask has finished, making them brittle in sequential settings. We propose SeqVLA, a completion-aware extension of $\pi_0$ that augments the base architecture with a lightweight detection head perceiving whether the current subtask is complete. This dual-head design enables SeqVLA not only to generate manipulation actions but also to autonomously trigger transitions between subtasks. We investigate four finetuning strategies that vary in how the action and detection heads are optimized (joint vs. sequential finetuning) and how pretrained knowledge is preserved (full finetuning vs. frozen backbone). Experiments are performed on two multi-stage tasks: salad packing with seven distinct subtasks and candy packing with four distinct subtasks. Results show that SeqVLA significantly outperforms the baseline $\pi_0$ and other strong baselines in overall success rate. In particular, joint finetuning with an unfrozen backbone yields the most decisive and statistically reliable completion predictions, eliminating sequence-related failures and enabling robust long-horizon execution. Our results highlight the importance of coupling action generation with subtask-aware detection for scalable sequential manipulation.
RFPPO: Motion Dynamic RRT based Fluid Field - PPO for Dynamic TF/TA Routing Planning
Dec 28, 2024


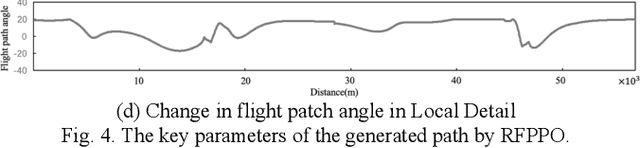
Existing local dynamic route planning algorithms, when directly applied to terrain following/terrain avoidance, or dynamic obstacle avoidance for large and medium-sized fixed-wing aircraft, fail to simultaneously meet the requirements of real-time performance, long-distance planning, and the dynamic constraints of large and medium-sized aircraft. To deal with this issue, this paper proposes the Motion Dynamic RRT based Fluid Field - PPO for dynamic TF/TA routing planning. Firstly, the action and state spaces of the proximal policy gradient algorithm are redesigned using disturbance flow fields and artificial potential field algorithms, establishing an aircraft dynamics model, and designing a state transition process based on this model. Additionally, a reward function is designed to encourage strategies for obstacle avoidance, terrain following, terrain avoidance, and safe flight. Experimental results on real DEM data demonstrate that our algorithm can complete long-distance flight tasks through collision-free trajectory planning that complies with dynamic constraints, without the need for prior global planning.
A Sparse Cross Attention-based Graph Convolution Network with Auxiliary Information Awareness for Traffic Flow Prediction
Dec 14, 2023Deep graph convolution networks (GCNs) have recently shown excellent performance in traffic prediction tasks. However, they face some challenges. First, few existing models consider the influence of auxiliary information, i.e., weather and holidays, which may result in a poor grasp of spatial-temporal dynamics of traffic data. Second, both the construction of a dynamic adjacent matrix and regular graph convolution operations have quadratic computation complexity, which restricts the scalability of GCN-based models. To address such challenges, this work proposes a deep encoder-decoder model entitled AIMSAN. It contains an auxiliary information-aware module (AIM) and sparse cross attention-based graph convolution network (SAN). The former learns multi-attribute auxiliary information and obtains its embedded presentation of different time-window sizes. The latter uses a cross-attention mechanism to construct dynamic adjacent matrices by fusing traffic data and embedded auxiliary data. Then, SAN applies diffusion GCN on traffic data to mine rich spatial-temporal dynamics. Furthermore, AIMSAN considers and uses the spatial sparseness of traffic nodes to reduce the quadratic computation complexity. Experimental results on three public traffic datasets demonstrate that the proposed method outperforms other counterparts in terms of various performance indices. Specifically, the proposed method has competitive performance with the state-of-the-art algorithms but saves 35.74% of GPU memory usage, 42.25% of training time, and 45.51% of validation time on average.