 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hermetic, Transparent Soft Growing Vine Robot System for Pipe Inspection
Oct 30, 2025Rehabilitation of aging pipes requires accurate condition assessment and mapping far into the pipe interiors. Soft growing vine robot systems are particularly promising for navigating confined, sinuous paths such as in pipes, but are currently limited by complex subsystems and a lack of validation in real-world industrial settings. In this paper, we introduce the concept and implementation of a hermetic and transparent vine robot system for visual condition assessment and mapping within non-branching pipes. This design encloses all mechanical and electrical components within the vine robot's soft, airtight, and transparent body, protecting them from environmental interference while enabling visual sensing. Because this approach requires an enclosed mechanism for transporting sensors, we developed, modeled, and tested a passively adapting enclosed tip mount. Finally, we validated the hermetic and transparent vine robot system concept through a real-world condition assessment and mapping task in a wastewater pipe. This work advances the use of soft-growing vine robots in pipe inspection by developing and demonstrating a robust, streamlined, field-validated system suitable for continued development and deployment.
Self-Wearing Adaptive Garments via Soft Robotic Unfurling
Jul 09, 2025Robotic dressing assistance has the potential to improve the quality of life for individuals with limited mobility. Existing solutions predominantly rely on rigid robotic manipulators, which have challenges in handling deformable garments and ensuring safe physical interaction with the human body. Prior robotic dressing methods require excessive operation times, complex control strategies, and constrained user postures, limiting their practicality and adaptability. This paper proposes a novel soft robotic dressing system, the Self-Wearing Adaptive Garment (SWAG), which uses an unfurling and growth mechanism to facilitate autonomous dressing. Unlike traditional approaches,the SWAG conforms to the human body through an unfurling based deployment method, eliminating skin-garment friction and enabling a safer and more efficient dressing process. We present the working principles of the SWAG, introduce its design and fabrication, and demonstrate its performance in dressing assistance. The proposed system demonstrates effective garment application across various garment configurations, presenting a promising alternative to conventional robotic dressing assistance.
3D Steering and Localization in Pipes and Burrows using an Externally Steered Soft Growing Robot
Jul 09, 2025



Navigation and inspection in confined environments, such as tunnels and pipes, pose significant challenges for existing robots due to limitations in maneuverability and adaptability to varying geometries. Vine robots, which are soft growing continuum robots that extend their length through soft material eversion at their tip, offer unique advantages due to their ability to navigate tight spaces, adapt to complex paths, and minimize friction. However, existing vine robot designs struggle with navigation in manmade and natural passageways, with branches and sharp 3D turns. In this letter, we introduce a steerable vine robot specifically designed for pipe and burrow environments. The robot features a simple tubular body and an external tip mount that steers the vine robot in three degrees of freedom by changing the growth direction and, when necessary, bracing against the wall of the pipe or burrow. Our external tip steering approach enables: (1) active branch selection in 3D space with a maximum steerable angle of 51.7{\deg}, (2) navigation of pipe networks with radii as small as 2.5 cm, (3) a compliant tip enabling navigation of sharp turns, and (4) real-time 3D localization in GPS-denied environments using tip-mounted sensors and continuum body odometry. We describe the forward kinematics, characterize steerability, and demonstrate the system in a 3D pipe system as well as a natural animal burrow.
Hoxels: Fully 3-D Printed Soft Multi-Modal & Multi-Contact Haptic Voxel Displays for Enriched Tactile Information Transfer
Sep 12, 2022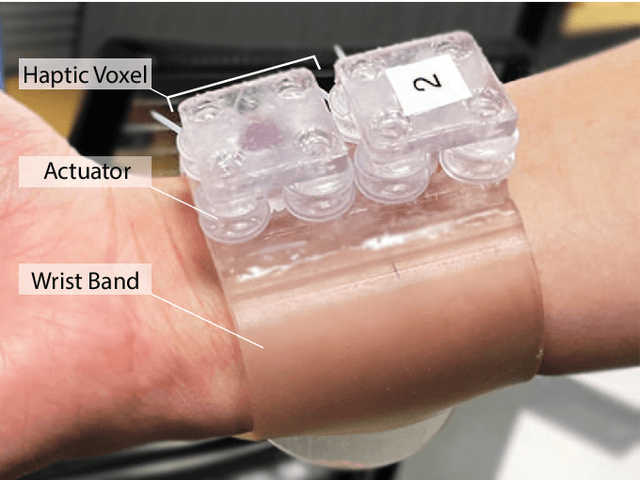
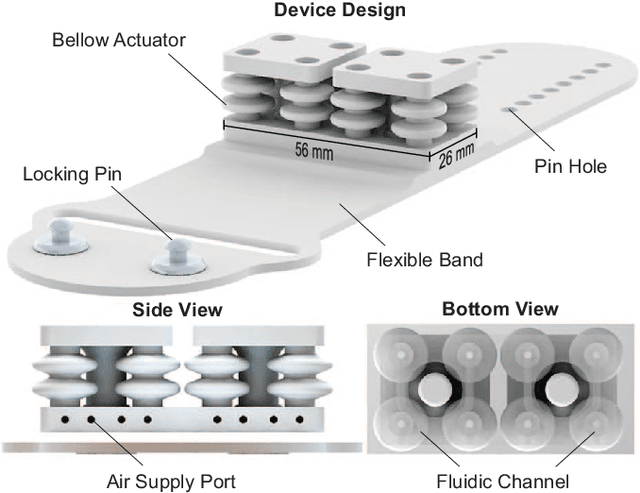
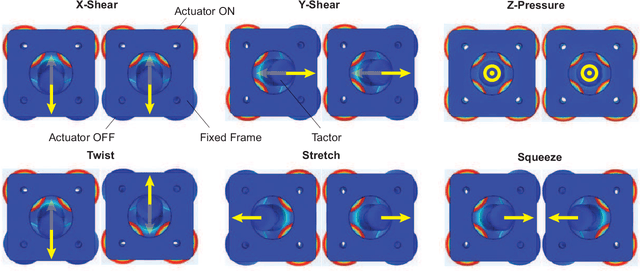
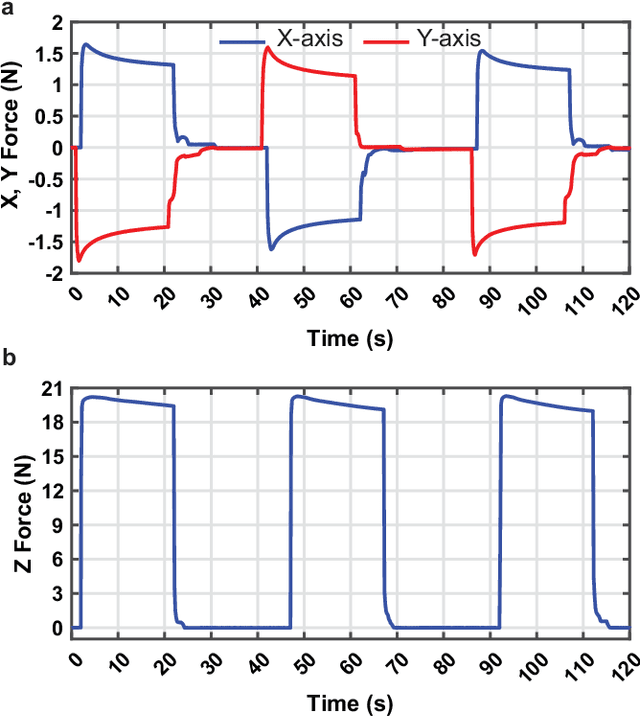
Wrist-worn haptic interfaces can deliver a wide range of tactile cues for communication of information and interaction with virtual objects. Unlike fingertips, the wrist and forearm provide a considerably large area of skin that allows the placement of multiple haptic actuators as a display for enriching tactile information transfer with minimal encumbrance. Existing multi-degree-of-freedom (DoF) wrist-worn devices employ traditional rigid robotic mechanisms and electric motors that limit their versatility, miniaturization, distribution, and assembly. Alternative solutions based on soft elastomeric actuator arrays constitute only 1-DoF haptic pixels. Higher-DoF prototypes produce a single interaction point and require complex manual assembly processes, such as molding and gluing several parts. These approaches limit the construction of high-DoF compact haptic displays, repeatability, and customizability. Here we present a novel, fully 3D-printed, soft, wearable haptic display for increasing tactile information transfer on the wrist and forearm with 3-DoF haptic voxels, called hoxels. Our initial prototype comprises two hoxels that provide skin shear, pressure, twist, stretch, squeeze, and other arbitrary stimuli. Each hoxel generates force up to 1.6 N in the x and y-axes and up to 20 N in the z-axis. Our method enables the rapid fabrication of versatile and forceful haptic displays.