 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHoxels: Fully 3-D Printed Soft Multi-Modal & Multi-Contact Haptic Voxel Displays for Enriched Tactile Information Transfer
Paper and Code
Sep 12, 2022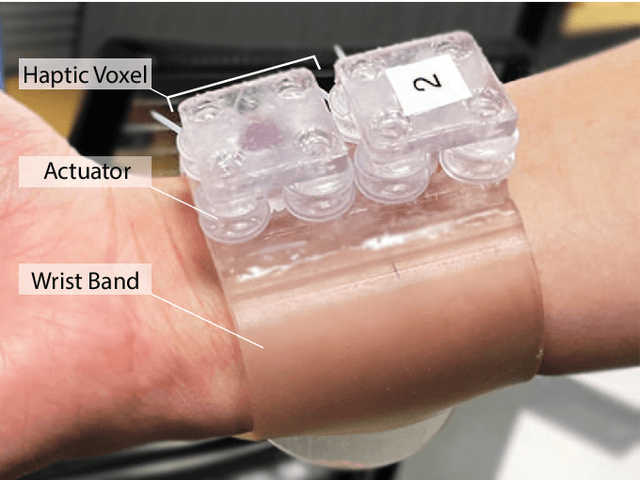
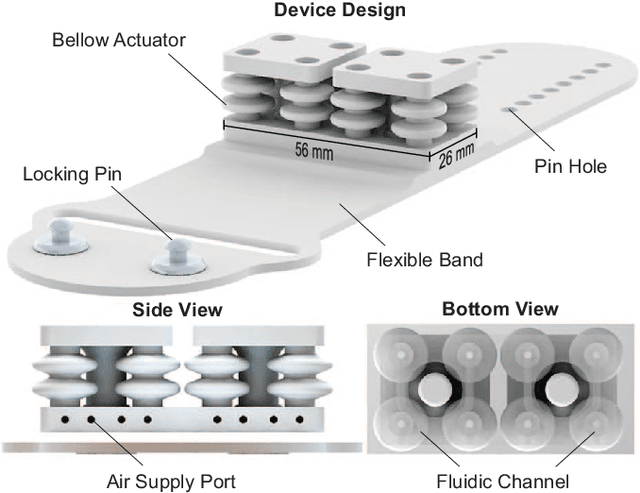
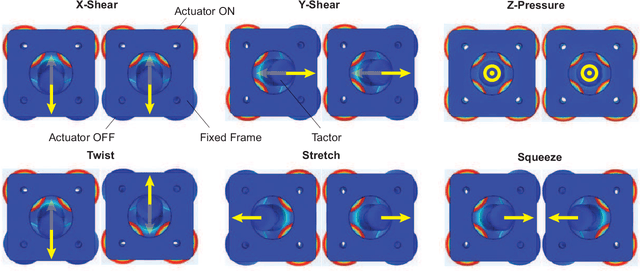
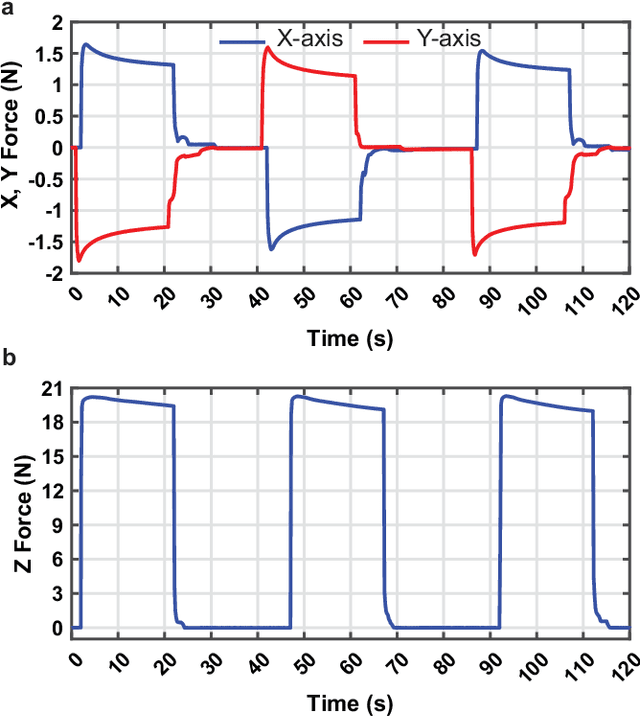
Wrist-worn haptic interfaces can deliver a wide range of tactile cues for communication of information and interaction with virtual objects. Unlike fingertips, the wrist and forearm provide a considerably large area of skin that allows the placement of multiple haptic actuators as a display for enriching tactile information transfer with minimal encumbrance. Existing multi-degree-of-freedom (DoF) wrist-worn devices employ traditional rigid robotic mechanisms and electric motors that limit their versatility, miniaturization, distribution, and assembly. Alternative solutions based on soft elastomeric actuator arrays constitute only 1-DoF haptic pixels. Higher-DoF prototypes produce a single interaction point and require complex manual assembly processes, such as molding and gluing several parts. These approaches limit the construction of high-DoF compact haptic displays, repeatability, and customizability. Here we present a novel, fully 3D-printed, soft, wearable haptic display for increasing tactile information transfer on the wrist and forearm with 3-DoF haptic voxels, called hoxels. Our initial prototype comprises two hoxels that provide skin shear, pressure, twist, stretch, squeeze, and other arbitrary stimuli. Each hoxel generates force up to 1.6 N in the x and y-axes and up to 20 N in the z-axis. Our method enables the rapid fabrication of versatile and forceful haptic displays.