 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDART: Dual-level Autonomous Robotic Topology for Efficient Exploration in Unknown Environments
Mar 17, 2025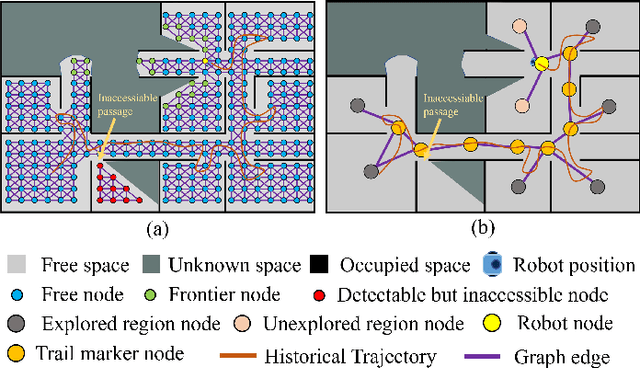
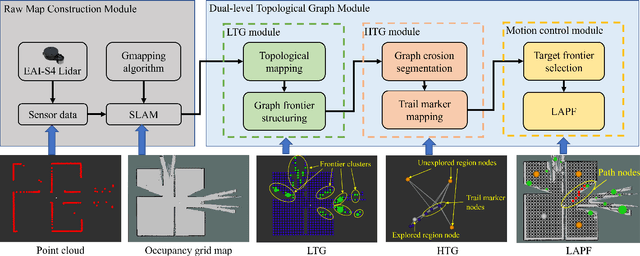

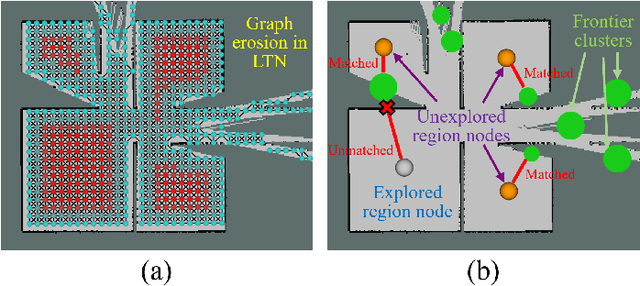
Conventional algorithms in autonomous exploration face challenges due to their inability to accurately and efficiently identify the spatial distribution of convex regions in the real-time map. These methods often prioritize navigation toward the nearest or information-rich frontiers -- the boundaries between known and unknown areas -- resulting in incomplete convex region exploration and requiring excessive backtracking to revisit these missed areas. To address these limitations, this paper introduces an innovative dual-level topological analysis approach. First, we introduce a Low-level Topological Graph (LTG), generated through uniform sampling of the original map data, which captures essential geometric and connectivity details. Next, the LTG is transformed into a High-level Topological Graph (HTG), representing the spatial layout and exploration completeness of convex regions, prioritizing the exploration of convex regions that are not fully explored and minimizing unnecessary backtracking. Finally, an novel Local Artificial Potential Field (LAPF) method is employed for motion control, replacing conventional path planning and boosting overall efficiency. Experimental results highlight the effectiveness of our approach. Simulation tests reveal that our framework significantly reduces exploration time and travel distance, outperforming existing methods in both speed and efficiency. Ablation studies confirm the critical role of each framework component. Real-world tests demonstrate the robustness of our method in environments with poor mapping quality, surpassing other approaches in adaptability to mapping inaccuracies and inaccessible areas.