 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistillPose: Lightweight Camera Localization Using Auxiliary Learning
Aug 09, 2021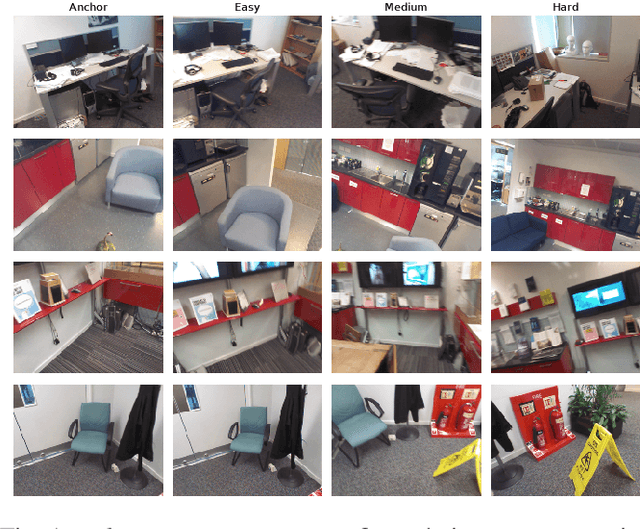
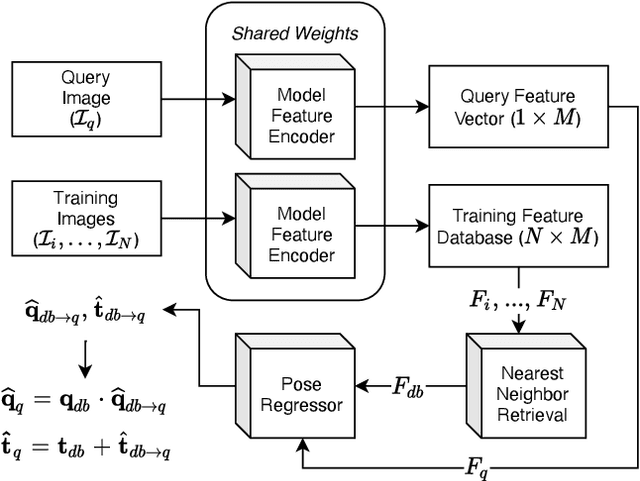
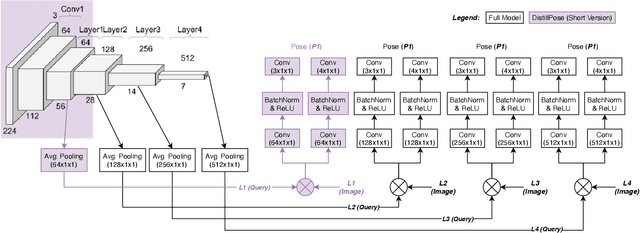
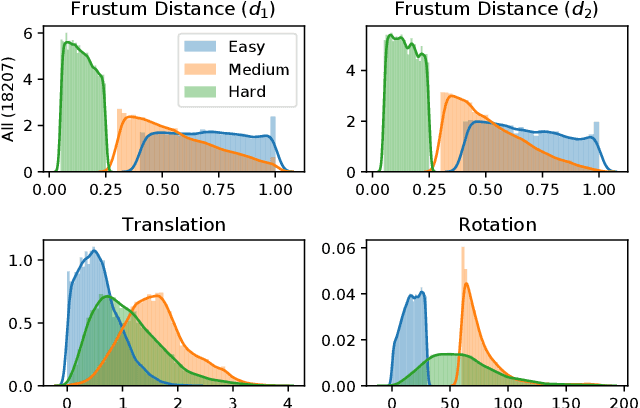
We propose a lightweight retrieval-based pipeline to predict 6DOF camera poses from RGB images. Our pipeline uses a convolutional neural network (CNN) to encode a query image as a feature vector. A nearest neighbor lookup finds the pose-wise nearest database image. A siamese convolutional neural network regresses the relative pose from the nearest neighboring database image to the query image. The relative pose is then applied to the nearest neighboring absolute pose to obtain the query image's final absolute pose prediction. Our model is a distilled version of NN-Net that reduces its parameters by 98.87%, information retrieval feature vector size by 87.5%, and inference time by 89.18% without a significant decrease in localization accuracy.
Driver Distraction Identification with an Ensemble of Convolutional Neural Networks
Jan 22, 2019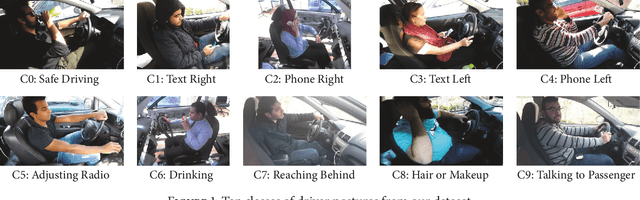

The World Health Organization (WHO) reported 1.25 million deaths yearly due to road traffic accidents worldwide and the number has been continuously increasing over the last few years. Nearly fifth of these accidents are caused by distracted drivers. Existing work of distracted driver detection is concerned with a small set of distractions (mostly, cell phone usage). Unreliable ad-hoc methods are often used.In this paper, we present the first publicly available dataset for driver distraction identification with more distraction postures than existing alternatives. In addition, we propose a reliable deep learning-based solution that achieves a 90% accuracy. The system consists of a genetically-weighted ensemble of convolutional neural networks, we show that a weighted ensemble of classifiers using a genetic algorithm yields in a better classification confidence. We also study the effect of different visual elements in distraction detection by means of face and hand localizations, and skin segmentation. Finally, we present a thinned version of our ensemble that could achieve 84.64% classification accuracy and operate in a real-time environment.
* arXiv admin note: substantial text overlap with arXiv:1706.09498
Real-time Distracted Driver Posture Classification
Oct 21, 2017

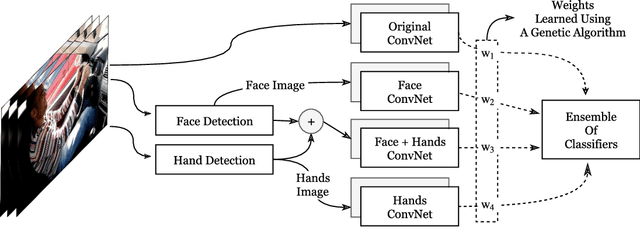

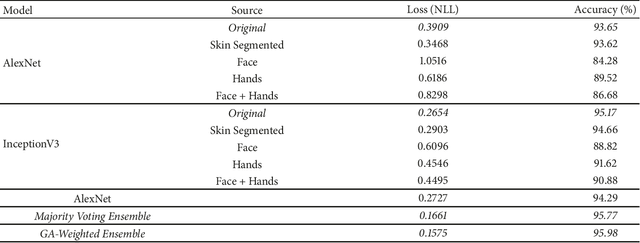
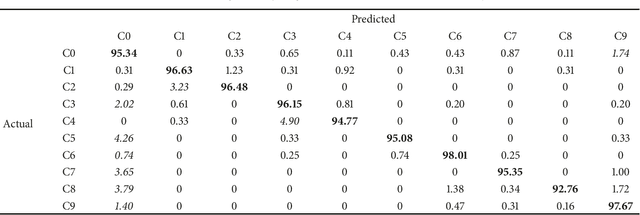
Distracted driving is a worldwide problem leading to an astoundingly increasing number of accidents and deaths. Existing work is concerned with a very small set of distractions (mostly, cell phone usage). Also, for the most part, it uses unreliable ad-hoc methods to detect those distractions. In this paper, we present the first publicly available dataset for "distracted driver" posture estimation with more distraction postures than existing alternatives. In addition, we propose a reliable system that achieves a 95.98% driving posture classification accuracy. The system consists of a genetically-weighted ensemble of Convolutional Neural Networks (CNNs). We show that a weighted ensemble of classifiers using a genetic algorithm yields in better classification confidence. We also study the effect of different visual elements (i.e. hands and face) in distraction detection by means of face and hand localizations. Finally, we present a thinned version of our ensemble that could achieve a 94.29% classification accuracy and operate in a real-time environment.
CIFAR-10: KNN-based Ensemble of Classifiers
Nov 15, 2016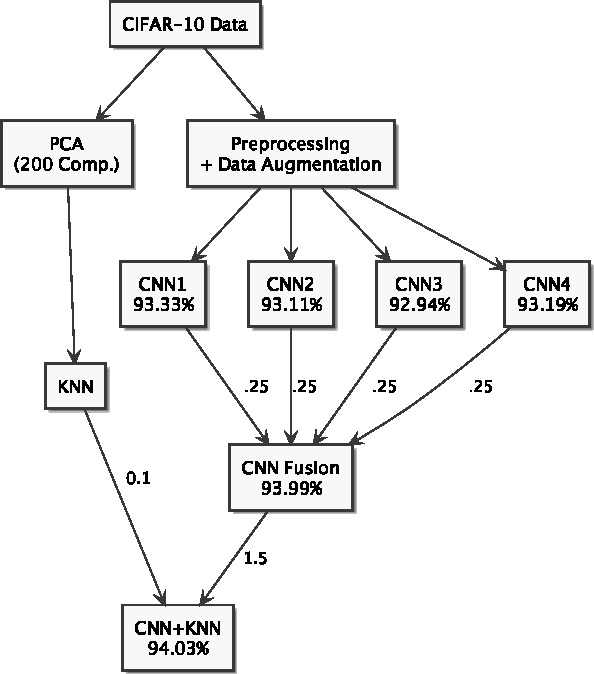
In this paper, we study the performance of different classifiers on the CIFAR-10 dataset, and build an ensemble of classifiers to reach a better performance. We show that, on CIFAR-10, K-Nearest Neighbors (KNN) and Convolutional Neural Network (CNN), on some classes, are mutually exclusive, thus yield in higher accuracy when combined. We reduce KNN overfitting using Principal Component Analysis (PCA), and ensemble it with a CNN to increase its accuracy. Our approach improves our best CNN model from 93.33% to 94.03%.
San Francisco Crime Classification
Jul 13, 2016
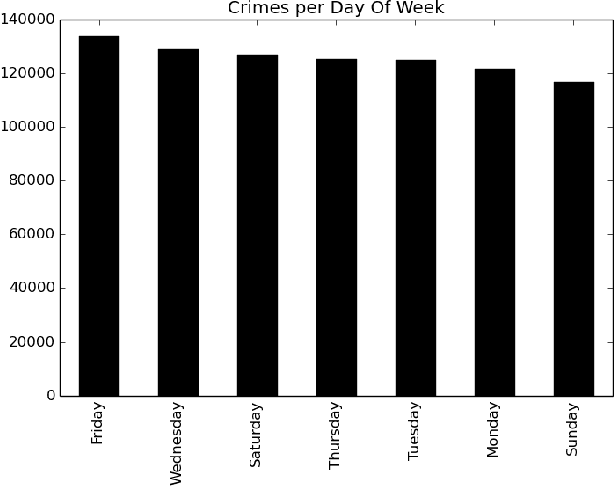
San Francisco Crime Classification is an online competition administered by Kaggle Inc. The competition aims at predicting the future crimes based on a given set of geographical and time-based features. In this paper, I achieved a an accuracy that ranks at top %18, as of May 19th, 2016. I will explore the data, and explain in details the tools I used to achieve that result.