 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Reinforcement Learning via Genetic Curriculum
Feb 17, 2022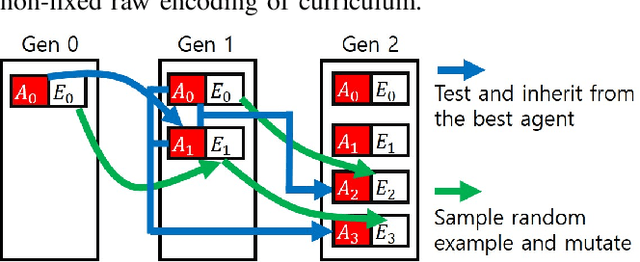
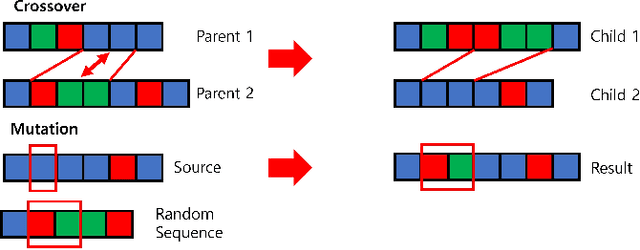

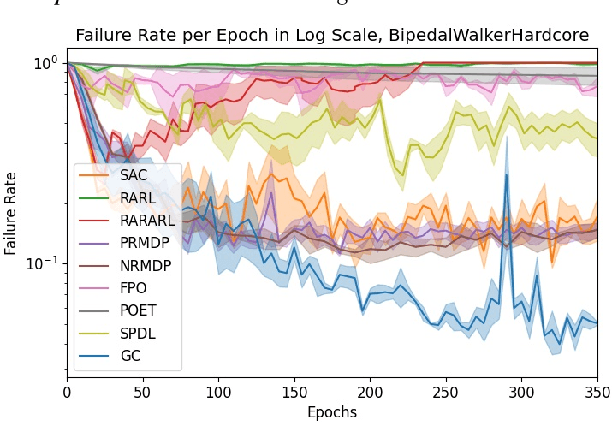
Achieving robust performance is crucial when applying deep reinforcement learning (RL) in safety critical systems. Some of the state of the art approaches try to address the problem with adversarial agents, but these agents often require expert supervision to fine tune and prevent the adversary from becoming too challenging to the trainee agent. While other approaches involve automatically adjusting environment setups during training, they have been limited to simple environments where low-dimensional encodings can be used. Inspired by these approaches, we propose genetic curriculum, an algorithm that automatically identifies scenarios in which the agent currently fails and generates an associated curriculum to help the agent learn to solve the scenarios and acquire more robust behaviors. As a non-parametric optimizer, our approach uses a raw, non-fixed encoding of scenarios, reducing the need for expert supervision and allowing our algorithm to adapt to the changing performance of the agent. Our empirical studies show improvement in robustness over the existing state of the art algorithms, providing training curricula that result in agents being 2 - 8x times less likely to fail without sacrificing cumulative reward. We include an ablation study and share insights on why our algorithm outperforms prior approaches.
Explainable Semantic Mapping for First Responders
Oct 15, 2019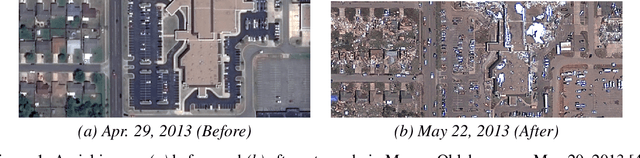
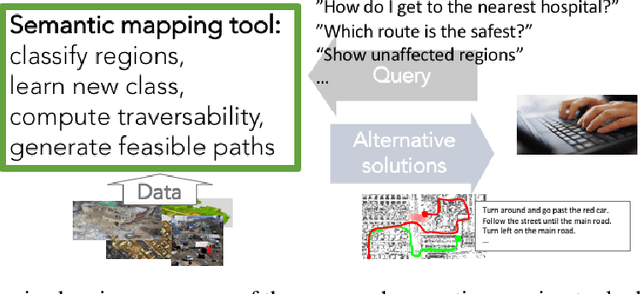
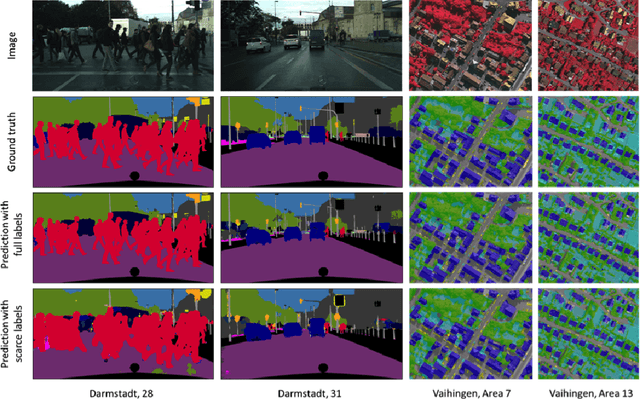
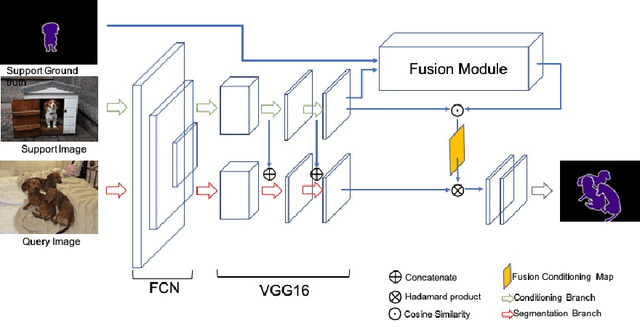
One of the key challenges in the semantic mapping problem in postdisaster environments is how to analyze a large amount of data efficiently with minimal supervision. To address this challenge, we propose a deep learning-based semantic mapping tool consisting of three main ideas. First, we develop a frugal semantic segmentation algorithm that uses only a small amount of labeled data. Next, we investigate on the problem of learning to detect a new class of object using just a few training examples. Finally, we develop an explainable cost map learning algorithm that can be quickly trained to generate traversability cost maps using only raw sensor data such as aerial-view imagery. This paper presents an overview of the proposed idea and the lessons learned.