 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTJU-DHD: A Diverse High-Resolution Dataset for Object Detection
Nov 18, 2020
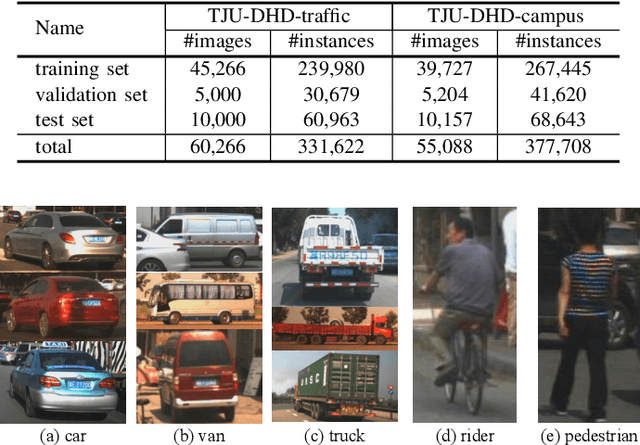
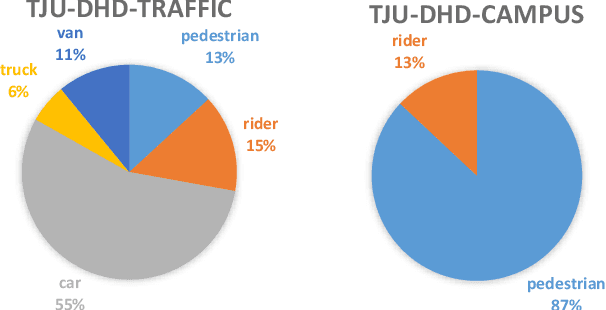
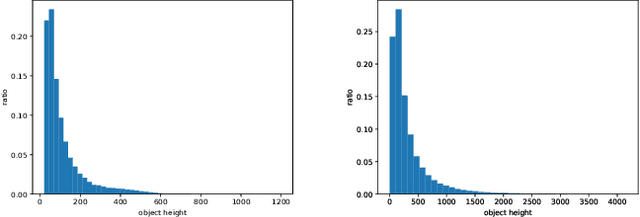
Vehicles, pedestrians, and riders are the most important and interesting objects for the perception modules of self-driving vehicles and video surveillance. However, the state-of-the-art performance of detecting such important objects (esp. small objects) is far from satisfying the demand of practical systems. Large-scale, rich-diversity, and high-resolution datasets play an important role in developing better object detection methods to satisfy the demand. Existing public large-scale datasets such as MS COCO collected from websites do not focus on the specific scenarios. Moreover, the popular datasets (e.g., KITTI and Citypersons) collected from the specific scenarios are limited in the number of images and instances, the resolution, and the diversity. To attempt to solve the problem, we build a diverse high-resolution dataset (called TJU-DHD). The dataset contains 115,354 high-resolution images (52% images have a resolution of 1624$\times$1200 pixels and 48% images have a resolution of at least 2,560$\times$1,440 pixels) and 709,330 labeled objects in total with a large variance in scale and appearance. Meanwhile, the dataset has a rich diversity in season variance, illumination variance, and weather variance. In addition, a new diverse pedestrian dataset is further built. With the four different detectors (i.e., the one-stage RetinaNet, anchor-free FCOS, two-stage FPN, and Cascade R-CNN), experiments about object detection and pedestrian detection are conducted. We hope that the newly built dataset can help promote the research on object detection and pedestrian detection in these two scenes. The dataset is available at https://github.com/tjubiit/TJU-DHD.
* object detection and pedestrian detection. website: https://github.com/tjubiit/TJU-DHD
NETNet: Neighbor Erasing and Transferring Network for Better Single Shot Object Detection
Jan 18, 2020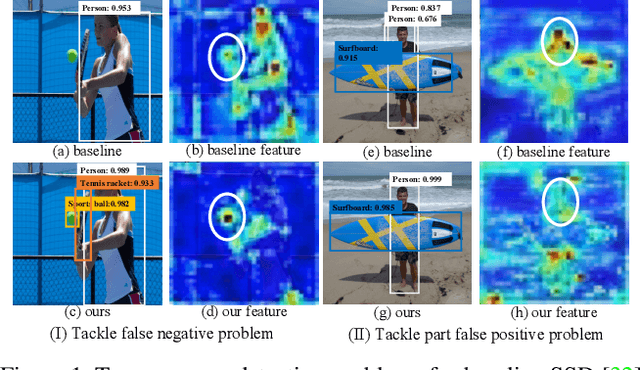
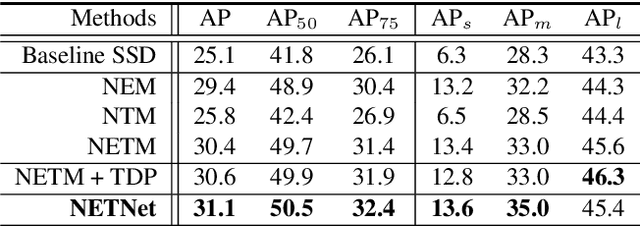
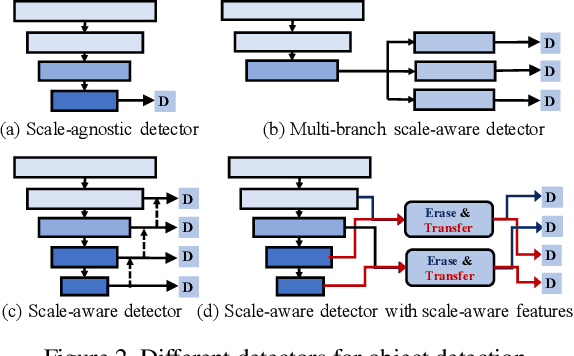
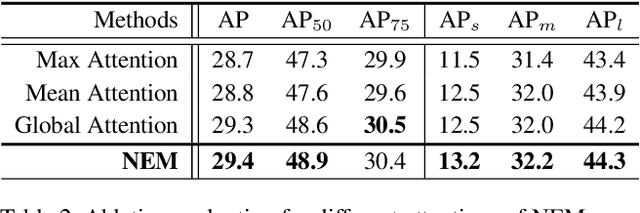
Due to the advantages of real-time detection and improved performance, single-shot detectors have gained great attention recently. To solve the complex scale variations, single-shot detectors make scale-aware predictions based on multiple pyramid layers. However, the features in the pyramid are not scale-aware enough, which limits the detection performance. Two common problems in single-shot detectors caused by object scale variations can be observed: (1) small objects are easily missed; (2) the salient part of a large object is sometimes detected as an object. With this observation, we propose a new Neighbor Erasing and Transferring (NET) mechanism to reconfigure the pyramid features and explore scale-aware features. In NET, a Neighbor Erasing Module (NEM) is designed to erase the salient features of large objects and emphasize the features of small objects in shallow layers. A Neighbor Transferring Module (NTM) is introduced to transfer the erased features and highlight large objects in deep layers. With this mechanism, a single-shot network called NETNet is constructed for scale-aware object detection. In addition, we propose to aggregate nearest neighboring pyramid features to enhance our NET. NETNet achieves 38.5% AP at a speed of 27 FPS and 32.0% AP at a speed of 55 FPS on MS COCO dataset. As a result, NETNet achieves a better trade-off for real-time and accurate object detection.