 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnoF-Diff: One-Step Diffusion-Based Anomaly Detection for Forceful Tool Use
Sep 18, 2025Multivariate time-series anomaly detection, which is critical for identifying unexpected events, has been explored in the field of machine learning for several decades. However, directly applying these methods to data from forceful tool use tasks is challenging because streaming sensor data in the real world tends to be inherently noisy, exhibits non-stationary behavior, and varies across different tasks and tools. To address these challenges, we propose a method, AnoF-Diff, based on the diffusion model to extract force-torque features from time-series data and use force-torque features to detect anomalies. We compare our method with other state-of-the-art methods in terms of F1-score and Area Under the Receiver Operating Characteristic curve (AUROC) on four forceful tool-use tasks, demonstrating that our method has better performance and is more robust to a noisy dataset. We also propose the method of parallel anomaly score evaluation based on one-step diffusion and demonstrate how our method can be used for online anomaly detection in several forceful tool use experiments.
Implicit Contact Diffuser: Sequential Contact Reasoning with Latent Point Cloud Diffusion
Oct 21, 2024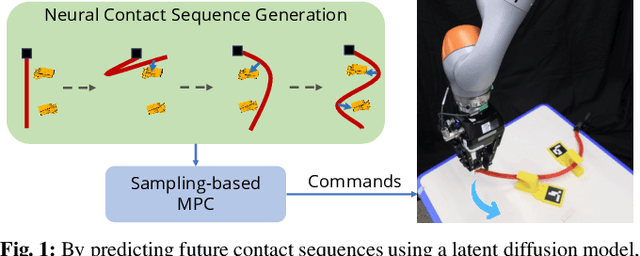
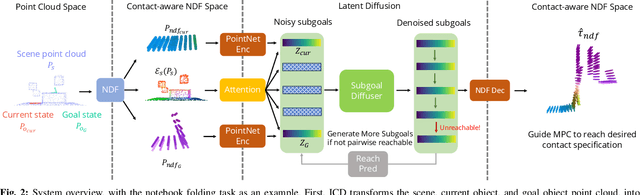
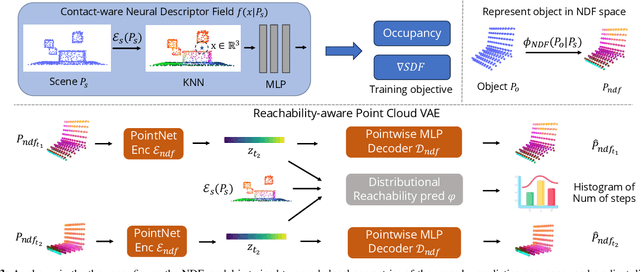
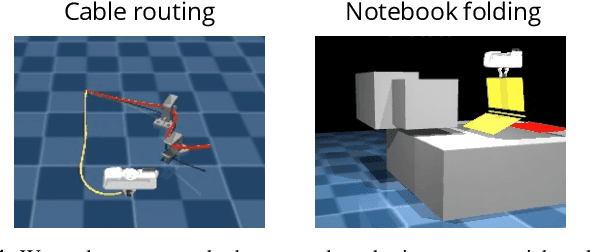
Long-horizon contact-rich manipulation has long been a challenging problem, as it requires reasoning over both discrete contact modes and continuous object motion. We introduce Implicit Contact Diffuser (ICD), a diffusion-based model that generates a sequence of neural descriptors that specify a series of contact relationships between the object and the environment. This sequence is then used as guidance for an MPC method to accomplish a given task. The key advantage of this approach is that the latent descriptors provide more task-relevant guidance to MPC, helping to avoid local minima for contact-rich manipulation tasks. Our experiments demonstrate that ICD outperforms baselines on complex, long-horizon, contact-rich manipulation tasks, such as cable routing and notebook folding. Additionally, our experiments also indicate that \methodshort can generalize a target contact relationship to a different environment. More visualizations can be found on our website $\href{https://implicit-contact-diffuser.github.io/}{https://implicit-contact-diffuser.github.io}$
Improving Out-of-Distribution Generalization of Learned Dynamics by Learning Pseudometrics and Constraint Manifolds
Mar 20, 2024We propose a method for improving the prediction accuracy of learned robot dynamics models on out-of-distribution (OOD) states. We achieve this by leveraging two key sources of structure often present in robot dynamics: 1) sparsity, i.e., some components of the state may not affect the dynamics, and 2) physical limits on the set of possible motions, in the form of nonholonomic constraints. Crucially, we do not assume this structure is known a priori, and instead learn it from data. We use contrastive learning to obtain a distance pseudometric that uncovers the sparsity pattern in the dynamics, and use it to reduce the input space when learning the dynamics. We then learn the unknown constraint manifold by approximating the normal space of possible motions from the data, which we use to train a Gaussian process (GP) representation of the constraint manifold. We evaluate our approach on a physical differential-drive robot and a simulated quadrotor, showing improved prediction accuracy on OOD data relative to baselines.
Subgoal Diffuser: Coarse-to-fine Subgoal Generation to Guide Model Predictive Control for Robot Manipulation
Mar 19, 2024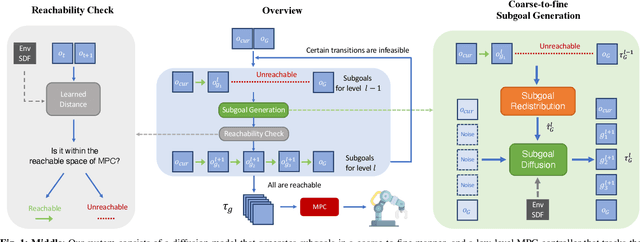
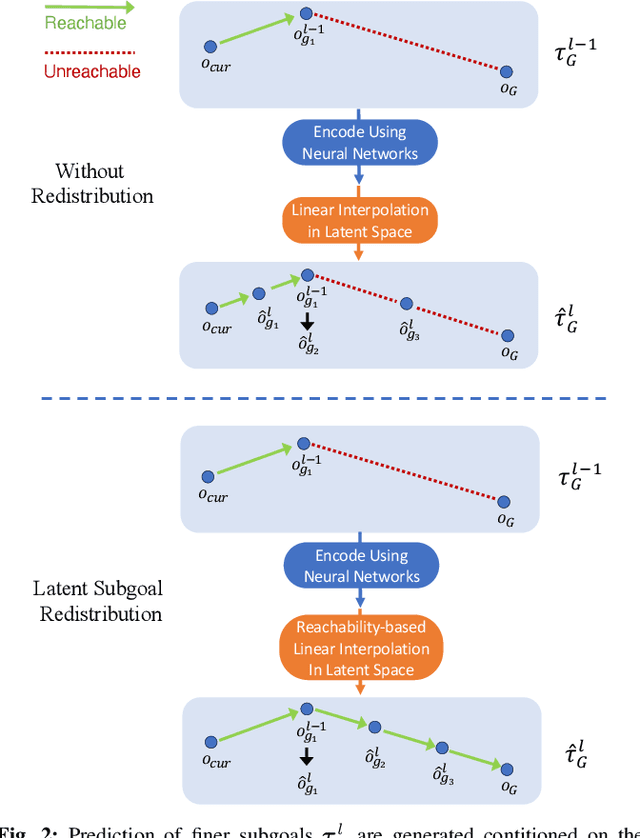
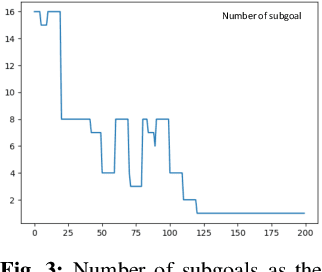
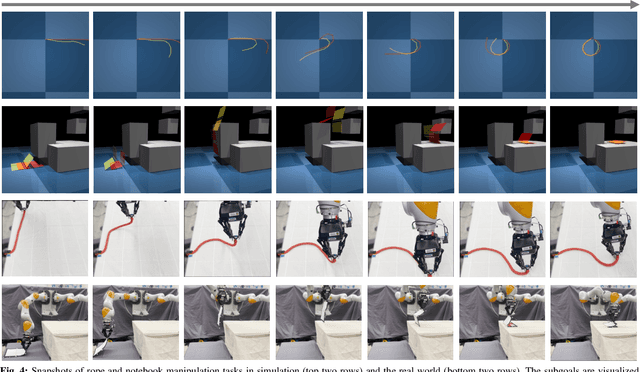
Manipulation of articulated and deformable objects can be difficult due to their compliant and under-actuated nature. Unexpected disturbances can cause the object to deviate from a predicted state, making it necessary to use Model-Predictive Control (MPC) methods to plan motion. However, these methods need a short planning horizon to be practical. Thus, MPC is ill-suited for long-horizon manipulation tasks due to local minima. In this paper, we present a diffusion-based method that guides an MPC method to accomplish long-horizon manipulation tasks by dynamically specifying sequences of subgoals for the MPC to follow. Our method, called Subgoal Diffuser, generates subgoals in a coarse-to-fine manner, producing sparse subgoals when the task is easily accomplished by MPC and more dense subgoals when the MPC method needs more guidance. The density of subgoals is determined dynamically based on a learned estimate of reachability, and subgoals are distributed to focus on challenging parts of the task. We evaluate our method on two robot manipulation tasks and find it improves the planning performance of an MPC method, and also outperforms prior diffusion-based methods.