 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReverse Modeling in Large Language Models
Oct 13, 2024



Humans are accustomed to reading and writing in a forward manner, and this natural bias extends to text understanding in auto-regressive large language models (LLMs). This paper investigates whether LLMs, like humans, struggle with reverse modeling, specifically with reversed text inputs. We found that publicly available pre-trained LLMs cannot understand such inputs. However, LLMs trained from scratch with both forward and reverse texts can understand them equally well during inference. Our case study shows that different-content texts result in different losses if input (to LLMs) in different directions -- some get lower losses for forward while some for reverse. This leads us to a simple and nice solution for data selection based on the loss differences between forward and reverse directions. Using our selected data in continued pretraining can boost LLMs' performance by a large margin across different language understanding benchmarks.
Learning Crowd Behaviors in Navigation with Attention-based Spatial-Temporal Graphs
Jan 11, 2024Safe and efficient navigation in dynamic environments shared with humans remains an open and challenging task for mobile robots. Previous works have shown the efficacy of using reinforcement learning frameworks to train policies for efficient navigation. However, their performance deteriorates when crowd configurations change, i.e. become larger or more complex. Thus, it is crucial to fully understand the complex, dynamic, and sophisticated interactions of the crowd resulting in proactive and foresighted behaviors for robot navigation. In this paper, a novel deep graph learning architecture based on attention mechanisms is proposed, which leverages the spatial-temporal graph to enhance robot navigation. We employ spatial graphs to capture the current spatial interactions, and through the integration with RNN, the temporal graphs utilize past trajectory information to infer the future intentions of each agent. The spatial-temporal graph reasoning ability allows the robot to better understand and interpret the relationships between agents over time and space, thereby making more informed decisions. Compared to previous state-of-the-art methods, our method demonstrates superior robustness in terms of safety, efficiency, and generalization in various challenging scenarios.
R-SARL: Crowd-aware Navigation Based Deep Reinforcement Learning for Nonholonomic Robot in Complex Environments
May 27, 2021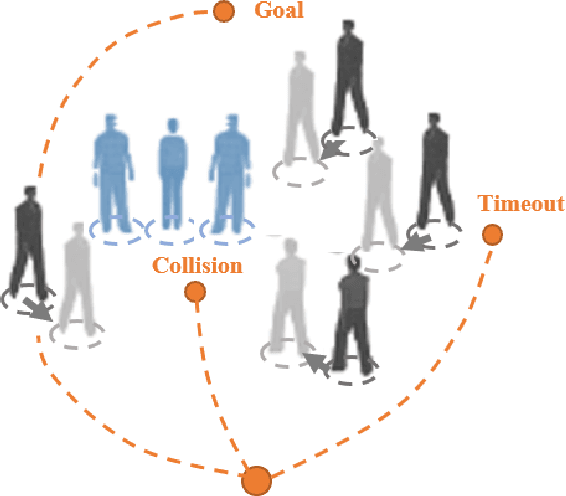
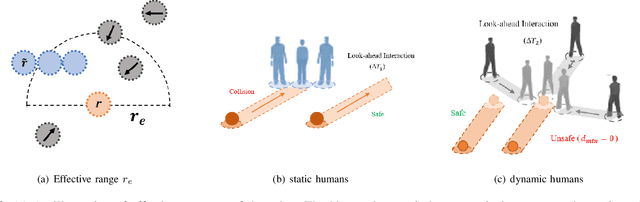
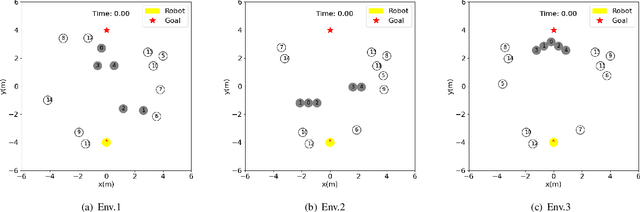
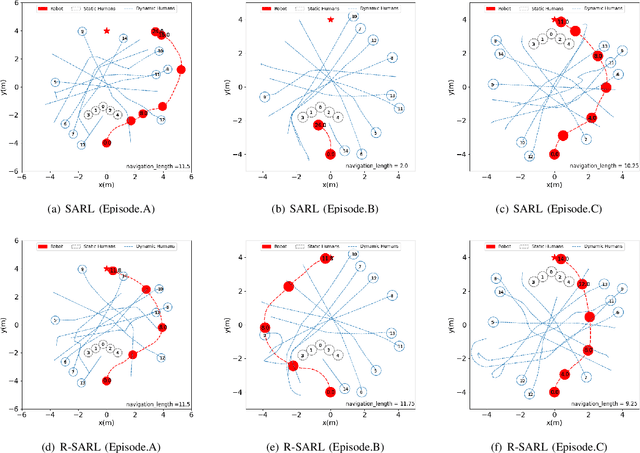
Robot navigation in a safe way for complex and crowded situations is studied in this work. When facing complex environments with both static and dynamic obstacles, in existing works unicycle nonholonomic robots are prone to two extreme behaviors, one is to fall into dead ends formed by obstacles, and the other is to not complete the navigation task in time due to excessive collision avoidance.As a result, we propose the R-SARL framework, which is based on a deep reinforcement learning algorithm and where we augment the reward function to avoid collisions. In particular, we estimate unsafe interactions between the robot and obstacles in a look-ahead distance and penalize accordingly, so that the robot can avoid collisions in advance and reach its destination safely.Furthermore, we penalize frequent excessive detours to reduce the timeout and thus improve the efficiency of navigation.We test our method in various challenging and complex crowd navigation tasks. The results show that our method improves navigation performance and outperforms state-of-the-art methods.