 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCin{é}matique d'une Proth{è}se de Main Myo{é}lectrique Accessible avec Actionneur Unique et R{é}tropulsion Passive du Pouce
Aug 23, 2022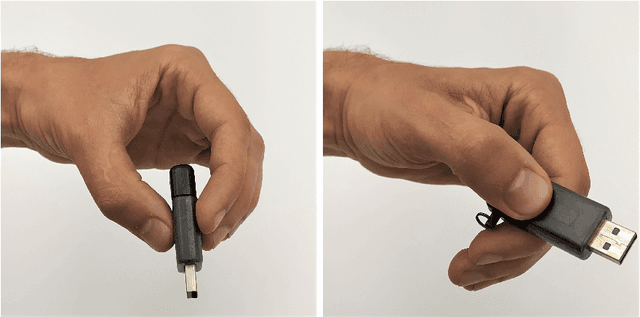
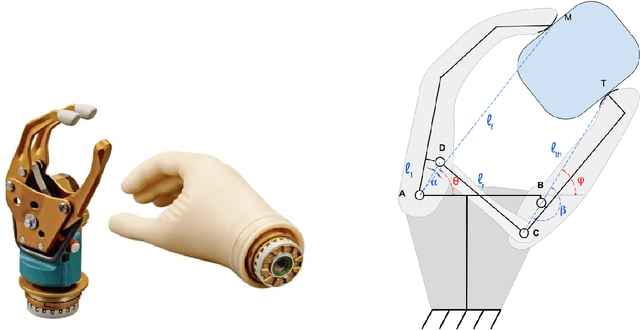
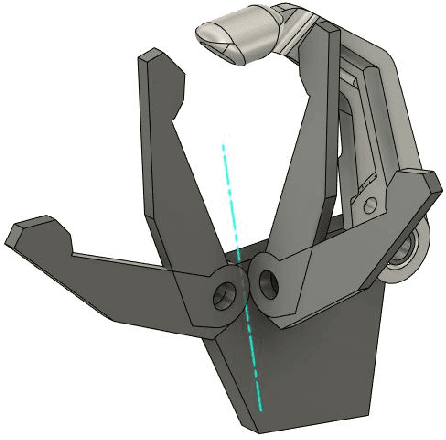
This work proposes a new kinematics of a myoelectric hand prosthesis with a single actuator, allowing to realize the tridigital grip but also the lateral grip. Inspired by tridigital prostheses, which are simpler, more robust and less expensive than polydigital prostheses, this new kinematics aims at proposing an accessible prosthesis (affordable, easy-to-use, robust, easy-to-repair). Cables are used instead of a rigid rod to transmit the movement bewteen the upper fingers and the thumb. The methods and design choices are detailed in this article. To conclude, the evaluation of the prototype by an experimented user leads to a first discussion of the results.
D{é}composition et analyse de trac{é}s EMG pour aider au diagnostic des maladies neuromusculaires
Sep 30, 2021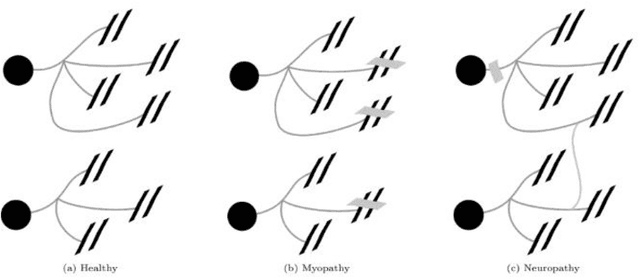
The electromyogram (EMG) in needle detection represents one of the steps of the electroneuromyogram (ENMG), an examination commonly performed in neurology. By inserting a needle into a muscle and studying the contraction during effort, the EMG provides extremely useful information on the functioning of the neuromuscular system of an individual, but it is an examination that remains complex to interpret. The objective of this work is to participate in the design and evaluation of a software allowing an automated analysis of EMG tracings of patients suspected of neuromuscular diseases, orienting the diagnosis towards either a neuropathic or myopathic process from recorded tracings. The software uses a method of signal decomposition according to a Markovian model, based on the analysis of motor unit potentials obtained by EMG, then a classification of the tracings. The tracings of 9 patients were thus analyzed and classified on the basis of the clinical interpretation of the neurologist, making it possible to initiate a "machine learning" process. The software will then be submitted to new tracings in order to test it against a practitioner experienced in EMG analysis.Translated with www.DeepL.com/Translator (free version)
Self-synchronization and Self-stabilization of 3D Bipedal Walking Gaits
Jul 07, 2017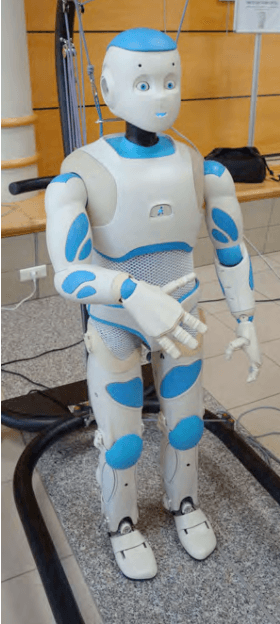
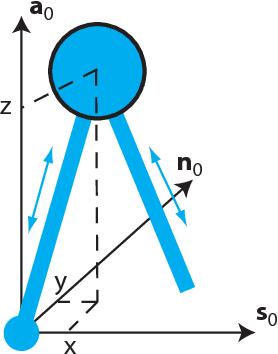
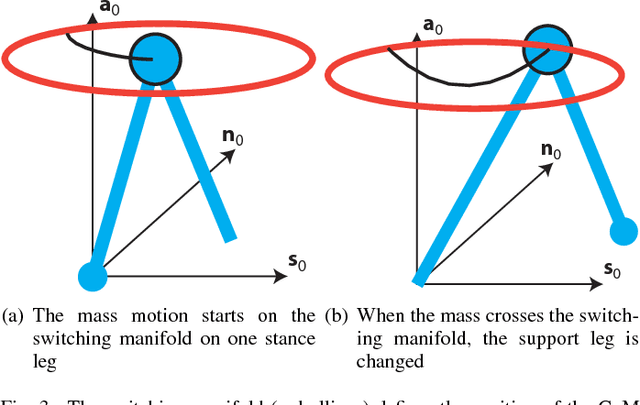
This paper seeks insight into stabilization mechanisms for periodic walking gaits in 3D bipedal robots. Based on this insight, a control strategy based on virtual constraints, which imposes coordination between joints rather than a temporal evolution, will be proposed for achieving asymptotic convergence toward a periodic motion. For planar bipeds with one degree of underactuation, it is known that a vertical displacement of the center of mass---with downward velocity at the step transition---induces stability of a walking gait. This paper concerns the qualitative extension of this type of property to 3D walking with two degrees of underactuation. It is shown that a condition on the position of the center of mass in the horizontal plane at the transition between steps induces synchronization between the motions in the sagittal and frontal planes. A combination of the conditions for self-synchronization and vertical oscillations leads to stable gaits. The algorithm for self-stabilization of 3D walking gaits is first developed for a simplified model of a walking robot (an inverted pendulum with variable length legs), and then it is extended to a complex model of the humanoid robot Romeo using the notion of Hybrid Zero Dynamics. Simulations of the model of the robot illustrate the efficacy of the method and its robustness.
Ball on a beam: stabilization under saturated input control with large basin of attraction
Mar 25, 2010



This article is devoted to the stabilization of two underactuated planar systems, the well-known straight beam-and-ball system and an original circular beam-and-ball system. The feedback control for each system is designed, using the Jordan form of its model, linearized near the unstable equilibrium. The limits on the voltage, fed to the motor, are taken into account explicitly. The straight beam-and-ball system has one unstable mode in the motion near the equilibrium point. The proposed control law ensures that the basin of attraction coincides with the controllability domain. The circular beam-and-ball system has two unstable modes near the equilibrium point. Therefore, this device, never considered in the past, is much more difficult to control than the straight beam-and-ball system. The main contribution is to propose a simple new control law, which ensures by adjusting its gain parameters that the basin of attraction arbitrarily can approach the controllability domain for the linear case. For both nonlinear systems, simulation results are presented to illustrate the efficiency of the designed nonlinear control laws and to determine the basin of attraction.