 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCin{é}matique d'une Proth{è}se de Main Myo{é}lectrique Accessible avec Actionneur Unique et R{é}tropulsion Passive du Pouce
Aug 23, 2022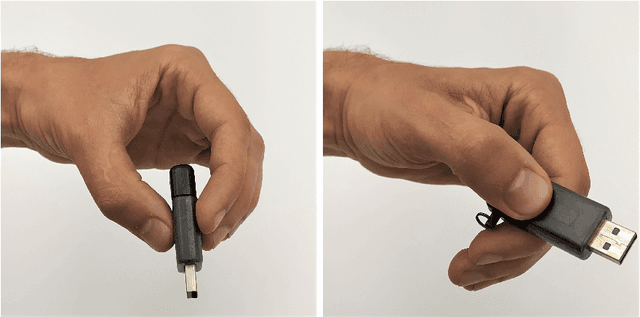
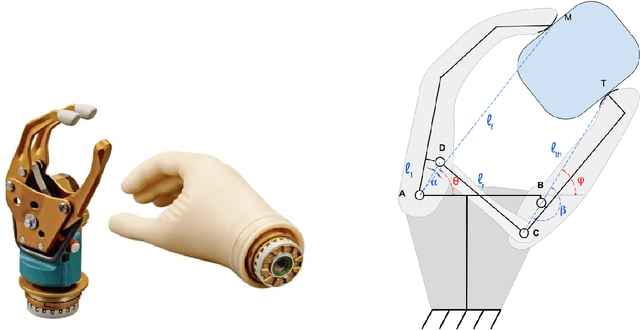
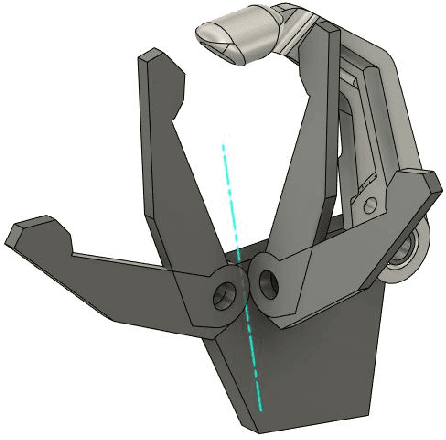
This work proposes a new kinematics of a myoelectric hand prosthesis with a single actuator, allowing to realize the tridigital grip but also the lateral grip. Inspired by tridigital prostheses, which are simpler, more robust and less expensive than polydigital prostheses, this new kinematics aims at proposing an accessible prosthesis (affordable, easy-to-use, robust, easy-to-repair). Cables are used instead of a rigid rod to transmit the movement bewteen the upper fingers and the thumb. The methods and design choices are detailed in this article. To conclude, the evaluation of the prototype by an experimented user leads to a first discussion of the results.
Design method for an anthropomorphic hand able to gesture and grasp
Apr 05, 2015
This paper presents a numerical method to conceive and design the kinematic model of an anthropomorphic robotic hand used for gesturing and grasping. In literature, there are few numerical methods for the finger placement of human-inspired robotic hands. In particular, there are no numerical methods, for the thumb placement, that aim to improve the hand dexterity and grasping capabilities by keeping the hand design close to the human one. While existing models are usually the result of successive parameter adjustments, the proposed method determines the fingers placements by mean of empirical tests. Moreover, a surgery test and the workspace analysis of the whole hand are used to find the best thumb position and orientation according to the hand kinematics and structure. The result is validated through simulation where it is checked that the hand looks well balanced and that it meets our constraints and needs. The presented method provides a numerical tool which allows the easy computation of finger and thumb geometries and base placements for a human-like dexterous robotic hand.
The NAO humanoid: a combination of performance and affordability
Sep 21, 2008This article presents the design of the autonomous humanoid robot called NAO that is built by the French company Aldebaran-Robotics. With its height of 0.57 m and its weight about 4.5 kg, this innovative robot is lightweight and compact. It distinguishes itself from its existing Japanese, American, and other counterparts thanks to its pelvis kinematics design, its proprietary actuation system based on brush DC motors, its electronic, computer and distributed software architectures. This robot has been designed to be affordable without sacrificing quality and performance. It is an open and easy-to-handle platform where the user can change all the embedded system software or just add some applications to make the robot adopt specific behaviours. The robot's head and forearms are modular and can be changed to promote further evolution. The comprehensive and functional design is one of the reasons that helped select NAO to replace the AIBO quadrupeds in the 2008 RoboCup standard league.