 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccuracy Limits as a Barrier to Biometric System Security
Dec 17, 2024Biometric systems are widely used for identity verification and identification, including authentication (i.e., one-to-one matching to verify a claimed identity) and identification (i.e., one-to-many matching to find a subject in a database). The matching process relies on measuring similarities or dissimilarities between a fresh biometric template and enrolled templates. The False Match Rate FMR is a key metric for assessing the accuracy and reliability of such systems. This paper analyzes biometric systems based on their FMR, with two main contributions. First, we explore untargeted attacks, where an adversary aims to impersonate any user within a database. We determine the number of trials required for an attacker to successfully impersonate a user and derive the critical population size (i.e., the maximum number of users in the database) required to maintain a given level of security. Furthermore, we compute the critical FMR value needed to ensure resistance against untargeted attacks as the database size increases. Second, we revisit the biometric birthday problem to evaluate the approximate and exact probabilities that two users in a database collide (i.e., can impersonate each other). Based on this analysis, we derive both the approximate critical population size and the critical FMR value needed to bound the likelihood of such collisions occurring with a given probability. These thresholds offer insights for designing systems that mitigate the risk of impersonation and collisions, particularly in large-scale biometric databases. Our findings indicate that current biometric systems fail to deliver sufficient accuracy to achieve an adequate security level against untargeted attacks, even in small-scale databases. Moreover, state-of-the-art systems face significant challenges in addressing the biometric birthday problem, especially as database sizes grow.
Authentication Attacks on Projection-based Cancelable Biometric Schemes
Oct 28, 2021
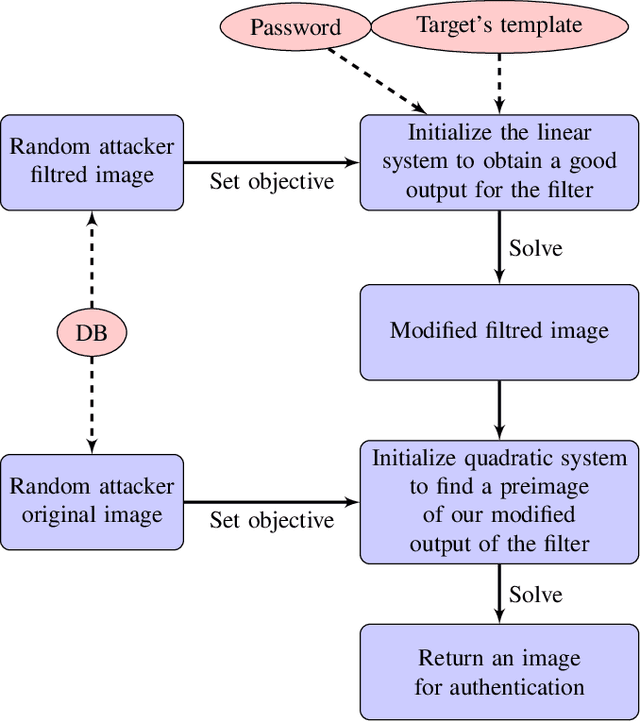
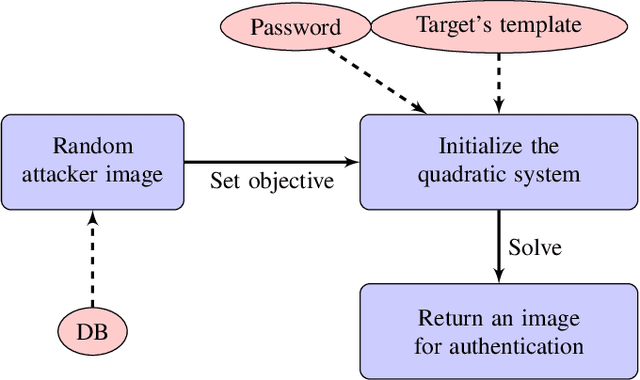
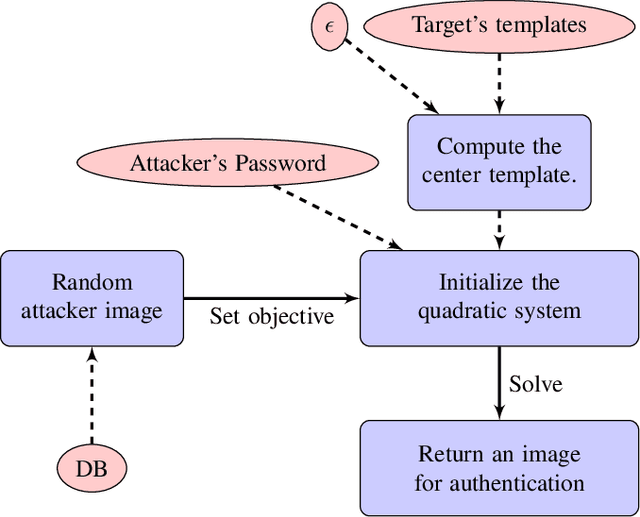
Cancelable biometric schemes aim at generating secure biometric templates by combining user specific tokens, such as password, stored secret or salt, along with biometric data. This type of transformation is constructed as a composition of a biometric transformation with a feature extraction algorithm. The security requirements of cancelable biometric schemes concern the irreversibility, unlinkability and revocability of templates, without losing in accuracy of comparison. While several schemes were recently attacked regarding these requirements, full reversibility of such a composition in order to produce colliding biometric characteristics, and specifically presentation attacks, were never demonstrated to the best of our knowledge. In this paper, we formalize these attacks for a traditional cancelable scheme with the help of integer linear programming (ILP) and quadratically constrained quadratic programming (QCQP). Solving these optimization problems allows an adversary to slightly alter its fingerprint image in order to impersonate any individual. Moreover, in an even more severe scenario, it is possible to simultaneously impersonate several individuals.
Shadoks Approach to Low-Makespan Coordinated Motion Planning
Mar 25, 2021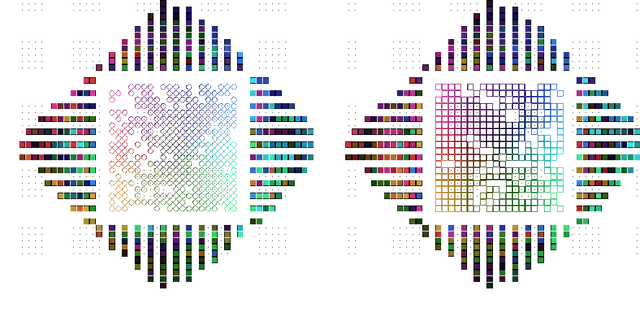
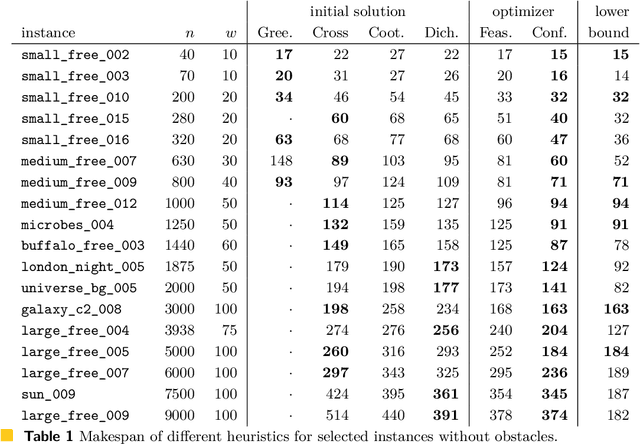
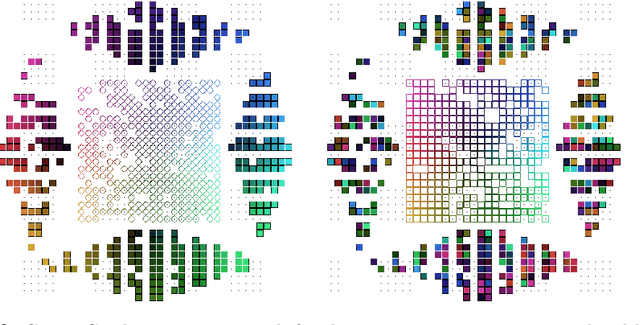
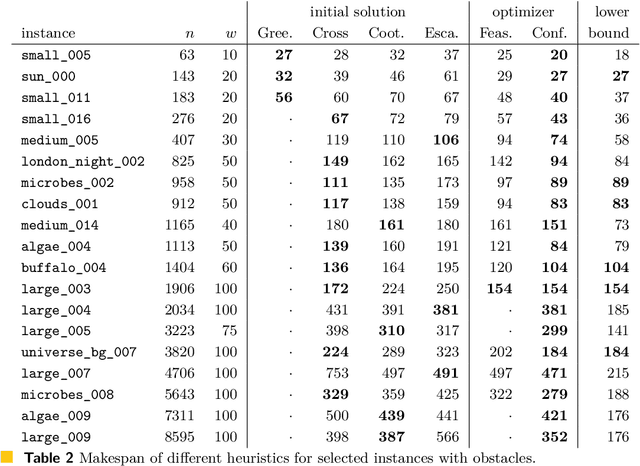
This paper describes the heuristics used by the Shadoks team for the CG:SHOP 2021 challenge. This year's problem is to coordinate the motion of multiple robots in order to reach their targets without collisions and minimizing the makespan. Using the heuristics outlined in this paper, our team won first place with the best solution to 202 out of 203 instances and optimal solutions to at least 105 of them.
Infinite Grid Exploration by Disoriented Robots
Jun 07, 2019



We deal with a set of autonomous robots moving on an infinite grid. Those robots are opaque, have limited visibility capabilities, and run using synchronous Look-Compute-Move cycles. They all agree on a common chirality, but have no global compass. Finally, they may use lights of different colors, but except from that, robots have neither persistent memories, nor communication mean. We consider the infinite grid exploration (IGE) problem. For this problem we give two impossibility results and three algorithms, including one which is optimal in terms of number of robots. In more detail, we first show that two robots are not sufficient in our settings to solve the problem, even when robots have a common coordinate system. We then show that if the robots' coordinate systems are not self-consistent, three or four robots are not sufficient to solve the problem. Finally, we present three algorithms that solve the IGE problem in various settings. The first algorithm uses six robots with constant colors and a visibility range of one. The second one uses the minimum number of robots, i.e., five, as well as five modifiable colors, still under visibility one. The last algorithm requires seven oblivious anonymous robots, yet assuming visibility two. Notice that the two last algorithms also satisfy achieve exclusiveness.
The NAO humanoid: a combination of performance and affordability
Sep 21, 2008This article presents the design of the autonomous humanoid robot called NAO that is built by the French company Aldebaran-Robotics. With its height of 0.57 m and its weight about 4.5 kg, this innovative robot is lightweight and compact. It distinguishes itself from its existing Japanese, American, and other counterparts thanks to its pelvis kinematics design, its proprietary actuation system based on brush DC motors, its electronic, computer and distributed software architectures. This robot has been designed to be affordable without sacrificing quality and performance. It is an open and easy-to-handle platform where the user can change all the embedded system software or just add some applications to make the robot adopt specific behaviours. The robot's head and forearms are modular and can be changed to promote further evolution. The comprehensive and functional design is one of the reasons that helped select NAO to replace the AIBO quadrupeds in the 2008 RoboCup standard league.