 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShadoks Approach to Low-Makespan Coordinated Motion Planning
Mar 25, 2021
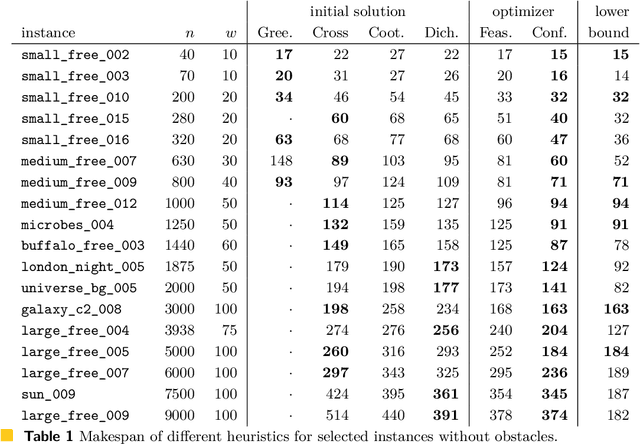
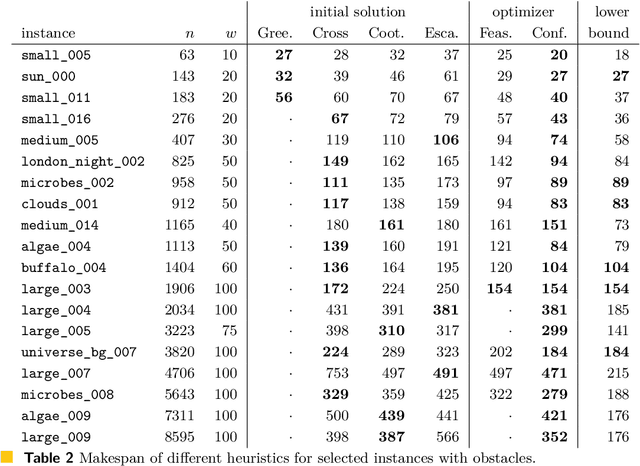
This paper describes the heuristics used by the Shadoks team for the CG:SHOP 2021 challenge. This year's problem is to coordinate the motion of multiple robots in order to reach their targets without collisions and minimizing the makespan. Using the heuristics outlined in this paper, our team won first place with the best solution to 202 out of 203 instances and optimal solutions to at least 105 of them.
Iterative beam search algorithms for the permutation flowshop
Sep 12, 2020
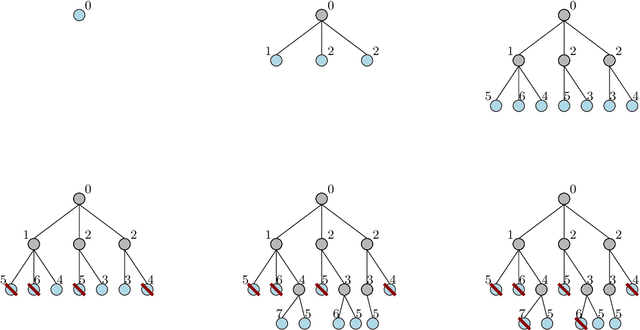
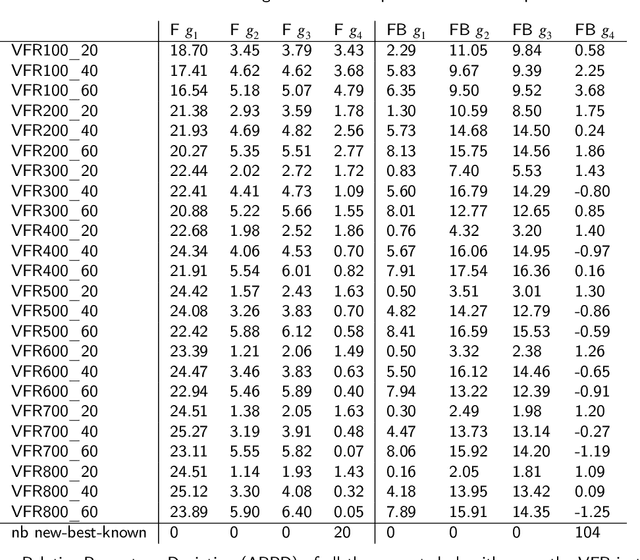
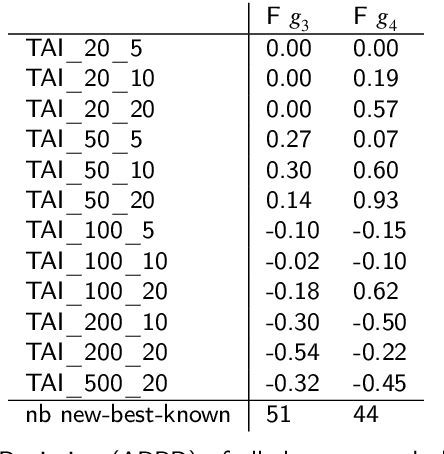
We study an iterative beam search algorithm for the permutation flowshop (makespan and flowtime minimization). This algorithm combines branching strategies inspired by recent branch-and-bounds and a guidance strategy inspired by the LR heuristic. It obtains competitive results, reports many new-best-so-far solutions on the VFR benchmark (makespan minimization) and the Taillard benchmark (flowtime minimization) without using any NEH-based branching or iterative-greedy strategy. The source code is available at: https://gitlab.com/librallu/cats-pfsp.
An anytime tree search algorithm for two-dimensional two- and three-staged guillotine packing problems
Apr 20, 2020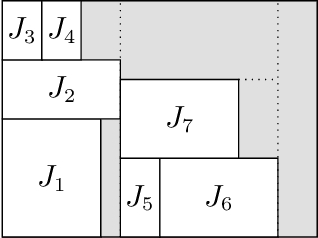
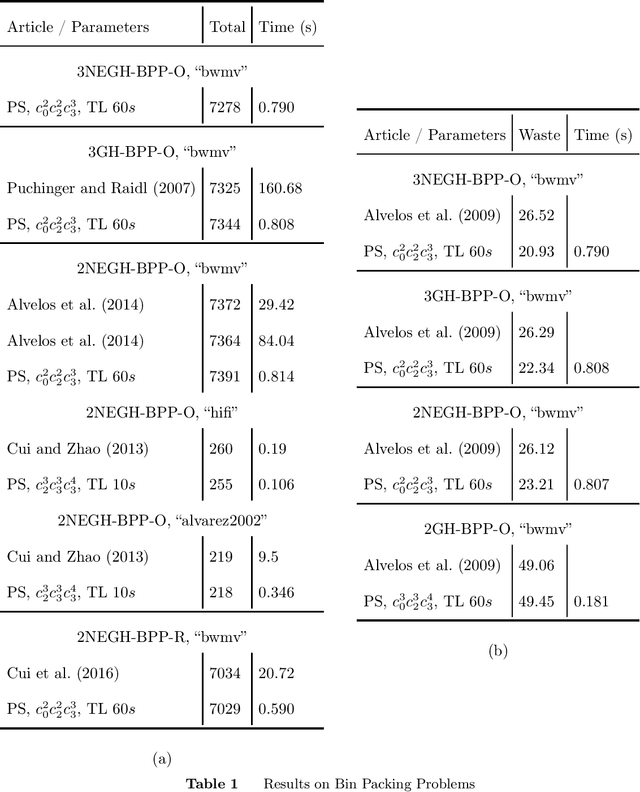
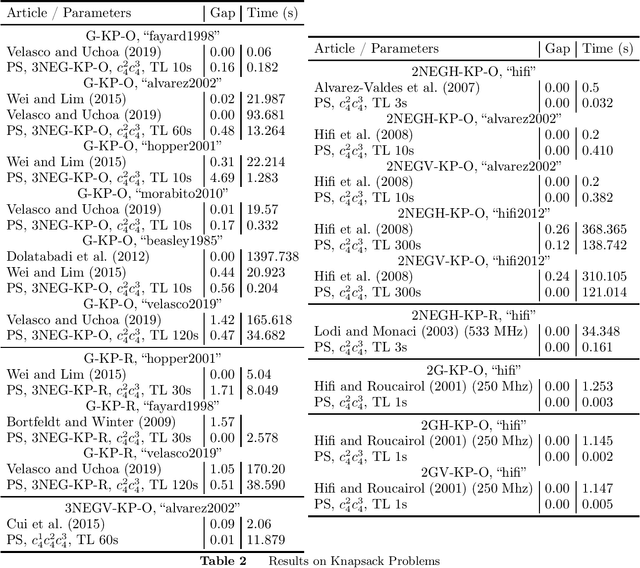
[libralesso_anytime_2020] proposed an anytime tree search algorithm for the 2018 ROADEF/EURO challenge glass cutting problem (https://www.roadef.org/challenge/2018/en/index.php). The resulting program was ranked first among 64 participants. In this article, we generalize it and show that it is not only effective for the specific problem it was originally designed for, but is also very competitive and even returns state-of-the-art solutions on a large variety of Cutting and Packing problems from the literature. We adapted the algorithm for two-dimensional Bin Packing, Multiple Knapsack, and Strip Packing Problems, with two- or three-staged exact or non-exact guillotine cuts, the orientation of the first cut being imposed or not, and with or without item rotation. The combination of efficiency, ability to provide good solutions fast, simplicity and versatility makes it particularly suited for industrial applications, which require quickly developing algorithms implementing several business-specific constraints. The algorithm is implemented in a new software package called PackingSolver.
An anytime tree search algorithm for the 2018 ROADEF/EURO challenge glass cutting problem
Apr 02, 2020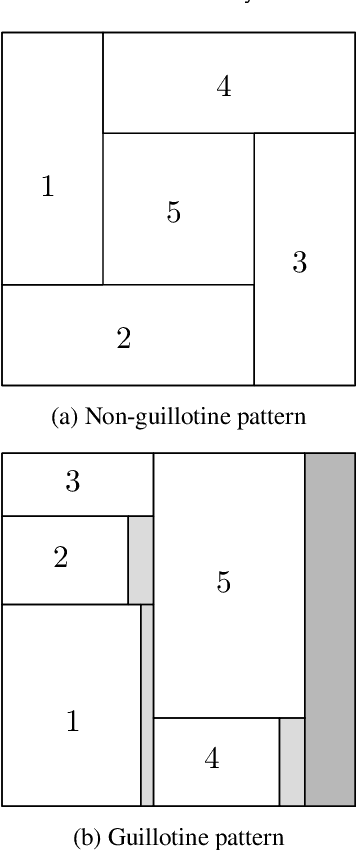
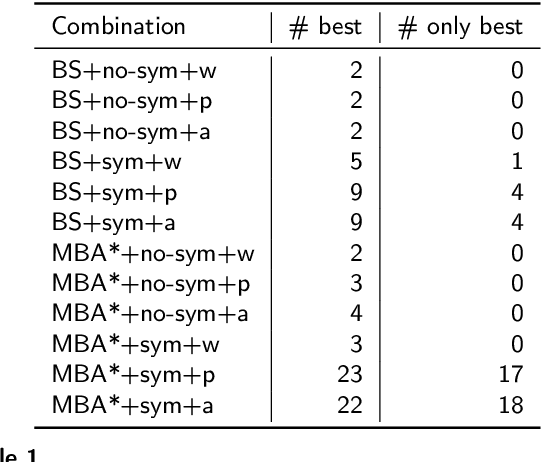
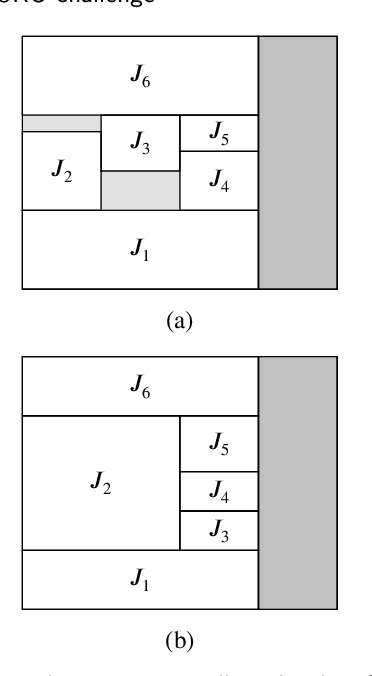
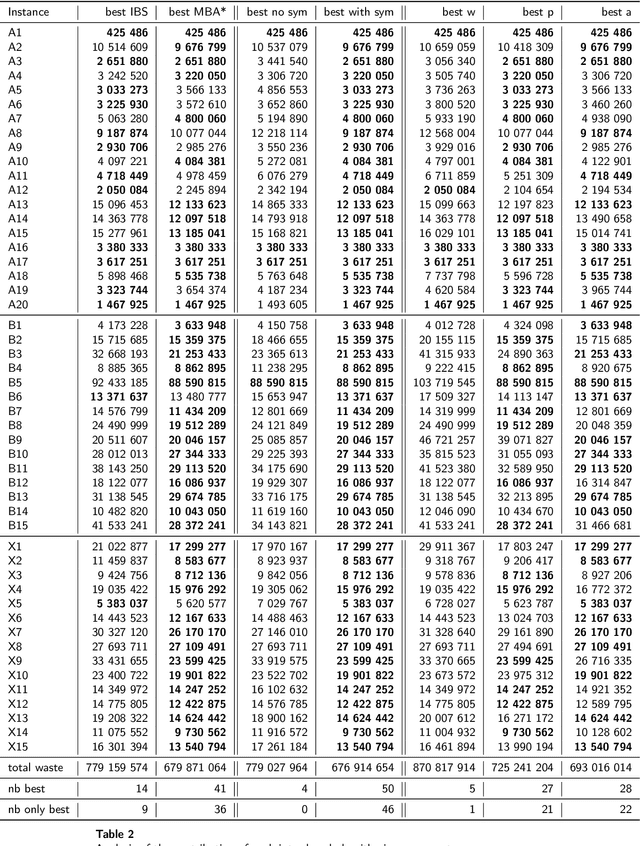
In this article, we present the anytime tree search algorithm we designed for the 2018 ROADEF/EURO challenge glass cutting problem proposed by the French company Saint-Gobain. The resulting program was ranked first among 64 participants. Its key components are: a new search algorithm called Memory Bounded A* (MBA*) with guide functions, a symmetry breaking strategy, and a pseudo-dominance rule. We perform a comprehensive study of these components showing that each of them contributes to the algorithm global performances. In addition, we designed a second tree search algorithm fully based on the pseudo-dominance rule and dedicated to some of the challenge instances with strong precedence constraints. On these instances, it finds the best-known solutions very quickly.