 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign method for an anthropomorphic hand able to gesture and grasp
Apr 05, 2015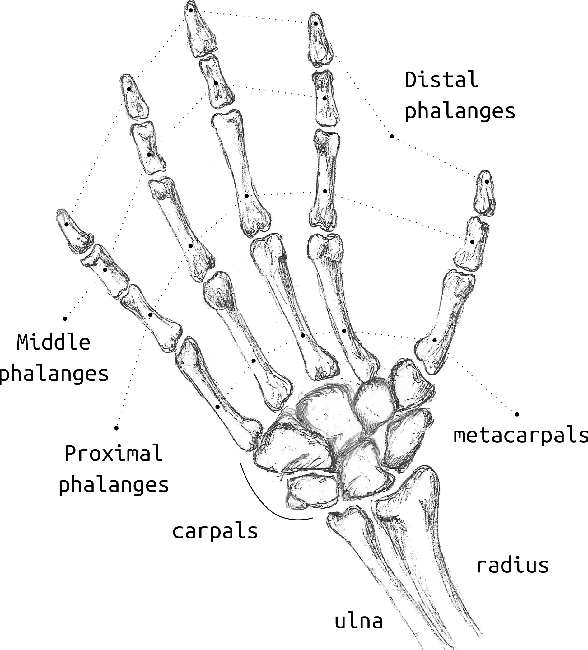
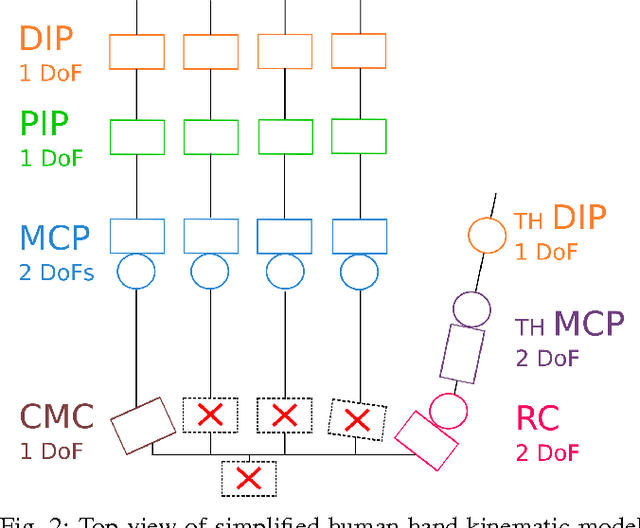
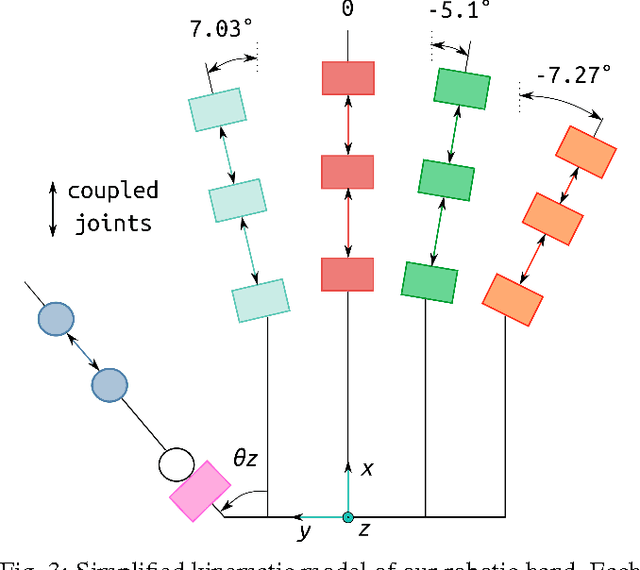
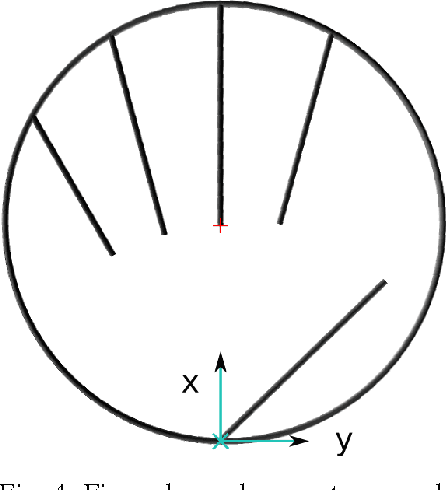
This paper presents a numerical method to conceive and design the kinematic model of an anthropomorphic robotic hand used for gesturing and grasping. In literature, there are few numerical methods for the finger placement of human-inspired robotic hands. In particular, there are no numerical methods, for the thumb placement, that aim to improve the hand dexterity and grasping capabilities by keeping the hand design close to the human one. While existing models are usually the result of successive parameter adjustments, the proposed method determines the fingers placements by mean of empirical tests. Moreover, a surgery test and the workspace analysis of the whole hand are used to find the best thumb position and orientation according to the hand kinematics and structure. The result is validated through simulation where it is checked that the hand looks well balanced and that it meets our constraints and needs. The presented method provides a numerical tool which allows the easy computation of finger and thumb geometries and base placements for a human-like dexterous robotic hand.
Predictive model of the human muscle fatigue: application to repetitive push-pull tasks with light external load
Mar 22, 2015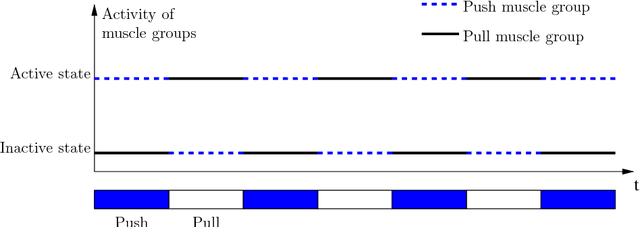
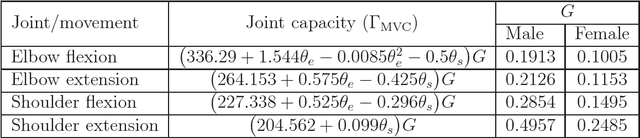
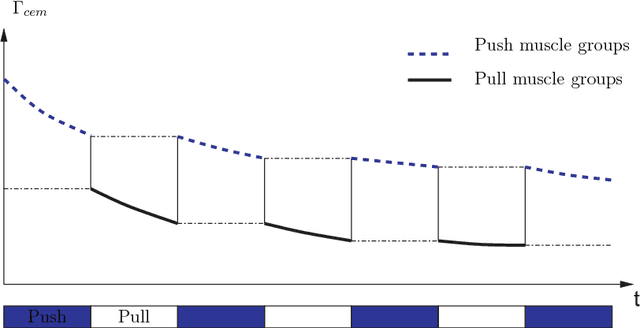
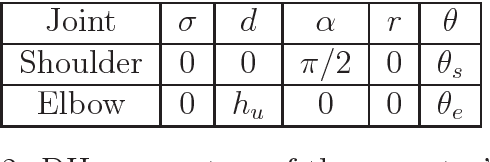
Repetitive tasks in industrial works may contribute to health problems among operators, such as musculo-skeletal disorders, in part due to insufficient control of muscle fatigue. In this paper, a predictive model of fatigue is proposed for repetitive push/pull operations. Assumptions generally accepted in the literature are first explicitly set in this framework. Then, an earlier static fatigue model is recalled and extended to quasi-static situations. Specifically, the maximal torque that can be generated at a joint is not considered as constant, but instead varies over time accordingly to the operator's changing posture. The fatigue model is implemented with this new consideration and evaluated in a simulation of push/pull operation. Reference to this paper should be made as follows: Sakka, S., Chablat, D., Ma, R. and Bennis, F. (2015) 'Predictive model of the human muscle fatigue: application to repetitive push-pull tasks with light external load', Int.