 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictive model of the human muscle fatigue: application to repetitive push-pull tasks with light external load
Mar 22, 2015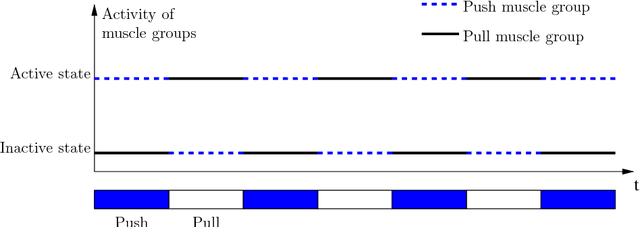
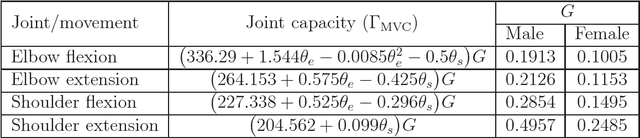
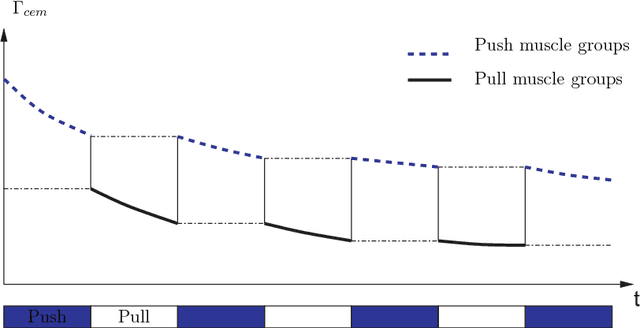
Repetitive tasks in industrial works may contribute to health problems among operators, such as musculo-skeletal disorders, in part due to insufficient control of muscle fatigue. In this paper, a predictive model of fatigue is proposed for repetitive push/pull operations. Assumptions generally accepted in the literature are first explicitly set in this framework. Then, an earlier static fatigue model is recalled and extended to quasi-static situations. Specifically, the maximal torque that can be generated at a joint is not considered as constant, but instead varies over time accordingly to the operator's changing posture. The fatigue model is implemented with this new consideration and evaluated in a simulation of push/pull operation. Reference to this paper should be made as follows: Sakka, S., Chablat, D., Ma, R. and Bennis, F. (2015) 'Predictive model of the human muscle fatigue: application to repetitive push-pull tasks with light external load', Int.
A new approach to muscle fatigue evaluation for Push/Pull task
Jun 07, 2012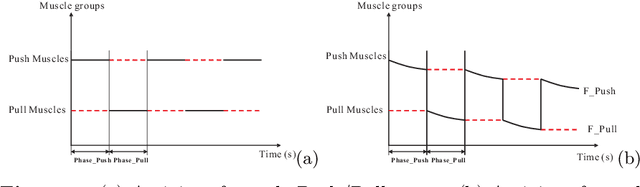
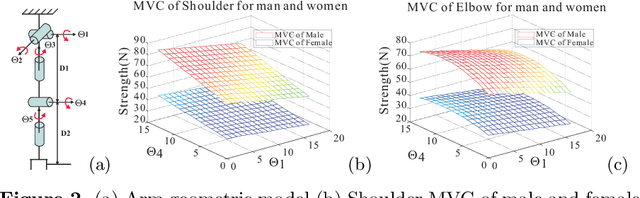
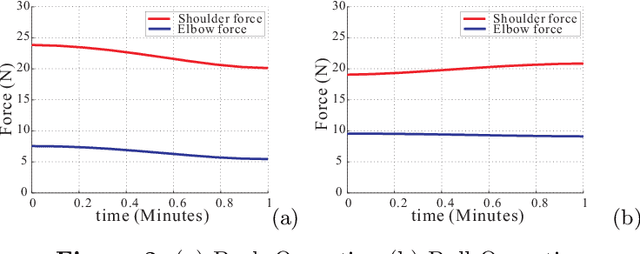
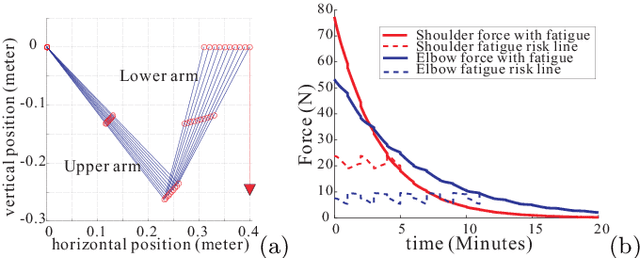
Pushing/Pulling tasks is an important part of work in many industries. Usually, most researchers study the Push/Pull tasks by analyzing different posture conditions, force requirements, velocity factors, etc. However few studies have reported the effects of fatigue. Fatigue caused by physical loading is one of the main reasons responsible for MusculoSkeletal Disorders (MSD). In this paper, muscle groups of articulation is considered and from joint level a new approach is proposed for muscle fatigue evaluation in the arms Push/Pull operations. The objective of this work is to predict the muscle fatigue situation in the Push/Pull tasks in order to reduce the probability of MSD problems for workers. A case study is presented to use this new approach for analyzing arm fatigue in Pushing/Pulling.
Human Arm simulation for interactive constrained environment design
Jun 07, 2012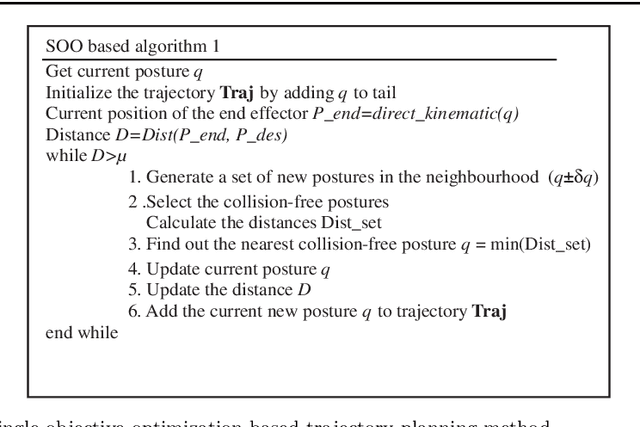
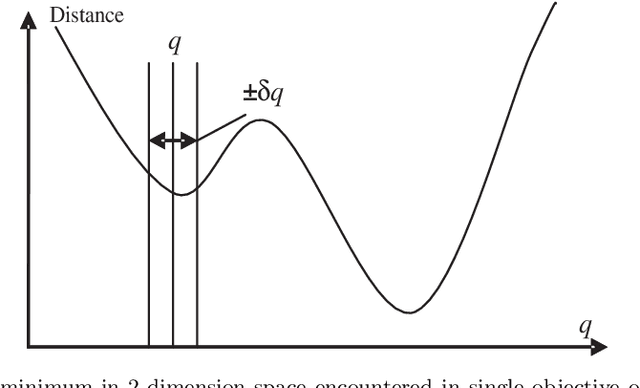
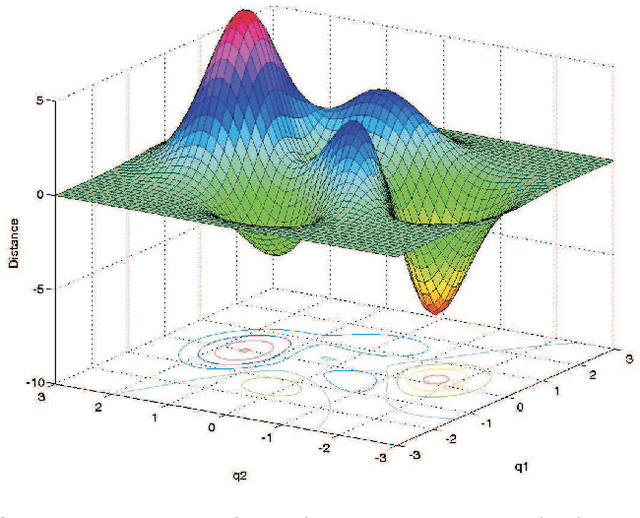
During the conceptual and prototype design stage of an industrial product, it is crucial to take assembly/disassembly and maintenance operations in advance. A well-designed system should enable relatively easy access of operating manipulators in the constrained environment and reduce musculoskeletal disorder risks for those manual handling operations. Trajectory planning comes up as an important issue for those assembly and maintenance operations under a constrained environment, since it determines the accessibility and the other ergonomics issues, such as muscle effort and its related fatigue. In this paper, a customer-oriented interactive approach is proposed to partially solve ergonomic related issues encountered during the design stage under a constrained system for the operator's convenience. Based on a single objective optimization method, trajectory planning for different operators could be generated automatically. Meanwhile, a motion capture based method assists the operator to guide the trajectory planning interactively when either a local minimum is encountered within the single objective optimization or the operator prefers guiding the virtual human manually. Besides that, a physical engine is integrated into this approach to provide physically realistic simulation in real time manner, so that collision free path and related dynamic information could be computed to determine further muscle fatigue and accessibility of a product design
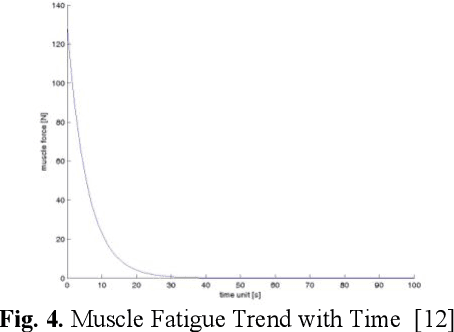
Human Muscle Fatigue Model in Dynamic Motions
Apr 08, 2012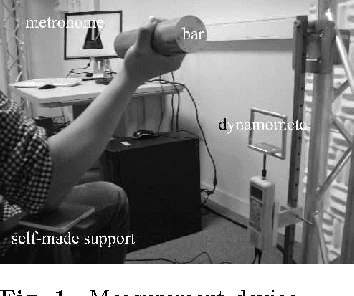
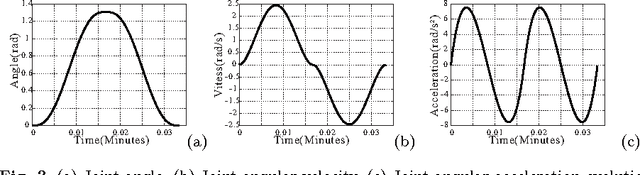
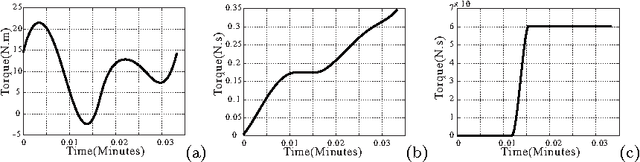
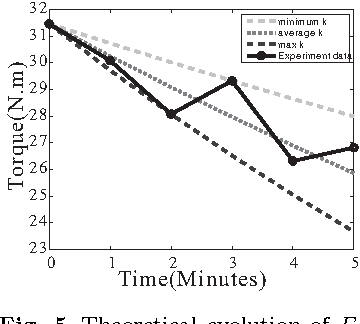
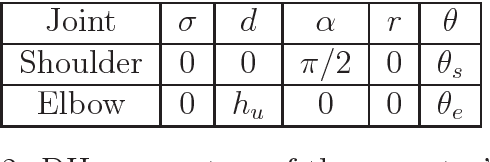
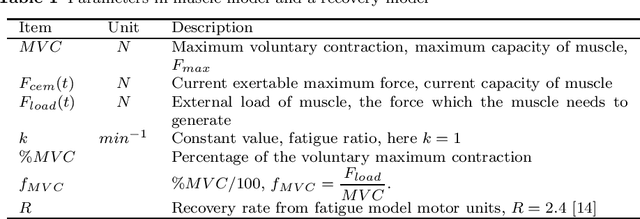
Human muscle fatigue is considered to be one of the main reasons for Musculoskeletal Disorder (MSD). Recent models have been introduced to define muscle fatigue for static postures. However, the main drawbacks of these models are that the dynamic effect of the human and the external load are not taken into account. In this paper, each human joint is assumed to be controlled by two muscle groups to generate motions such as push/pull. The joint torques are computed using Lagrange's formulation to evaluate the dynamic factors of the muscle fatigue model. An experiment is defined to validate this assumption and the result for one person confirms its feasibility. The evaluation of this model can predict the fatigue and MSD risk in industry production quickly.
A framework of motion capture system based human behaviours simulation for ergonomic analysis
Apr 05, 2011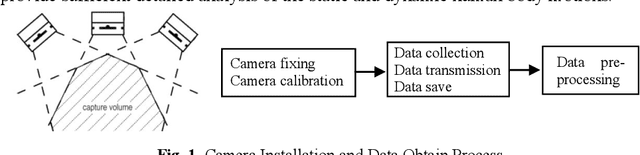

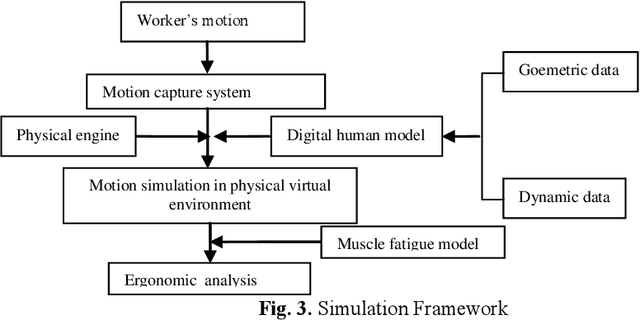
With the increasing of computer capabilities, Computer aided ergonomics (CAE) offers new possibilities to integrate conventional ergonomic knowledge and to develop new methods into the work design process. As mentioned in [1], different approaches have been developed to enhance the efficiency of the ergonomic evaluation. Ergonomic expert systems, ergonomic oriented information systems, numerical models of human, etc. have been implemented in numerical ergonomic software. Until now, there are ergonomic software tools available, such as Jack, Ergoman, Delmia Human, 3DSSPP, and Santos, etc. [2-4]. The main functions of these tools are posture analysis and posture prediction. In the visualization part, Jack and 3DSSPP produce results to visualize virtual human tasks in 3-dimensional, but without realistic physical properties. Nowadays, with the development of computer technology, the simulation of physical world is paid more attention. Physical engines [5] are used more and more in computer game (CG) field. The advantage of physical engine is the nature physical world environment simulation. The purpose of our research is to use the CG technology to create a virtual environment with physical properties for ergonomic analysis of virtual human.
Using virtual human for an interactive customer-oriented constrained environment design
Dec 20, 2010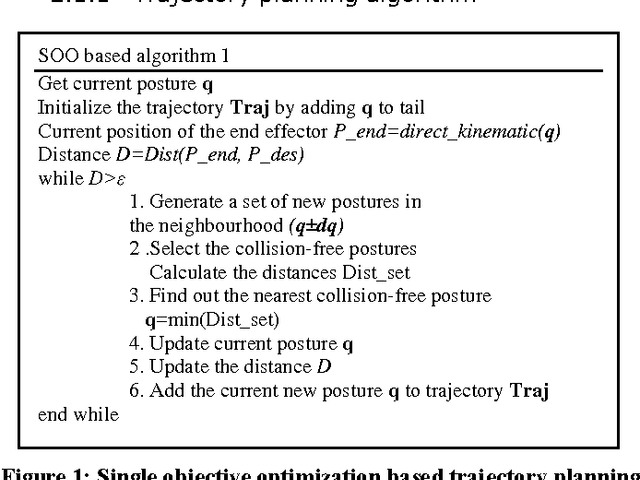


For industrial product design, it is very important to take into account assembly/disassembly and maintenance operations during the conceptual and prototype design stage. For these operations or other similar operations in a constrained environment, trajectory planning is always a critical and difficult issue for evaluating the design or for the users' convenience. In this paper, a customer-oriented approach is proposed to partially solve ergonomic issues encountered during the design stage of a constrained environment. A single objective optimization based method is taken from the literature to generate the trajectory in a constrained environment automatically. A motion capture based method assists to guide the trajectory planning interactively if a local minimum is encountered within the single objective optimization. At last, a multi-objective evaluation method is proposed to evaluate the operations generated by the algorithm