 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing virtual human for an interactive customer-oriented constrained environment design
Paper and Code
Dec 20, 2010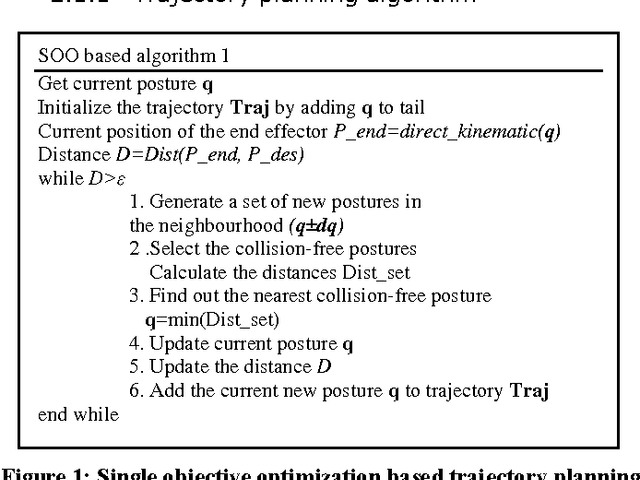


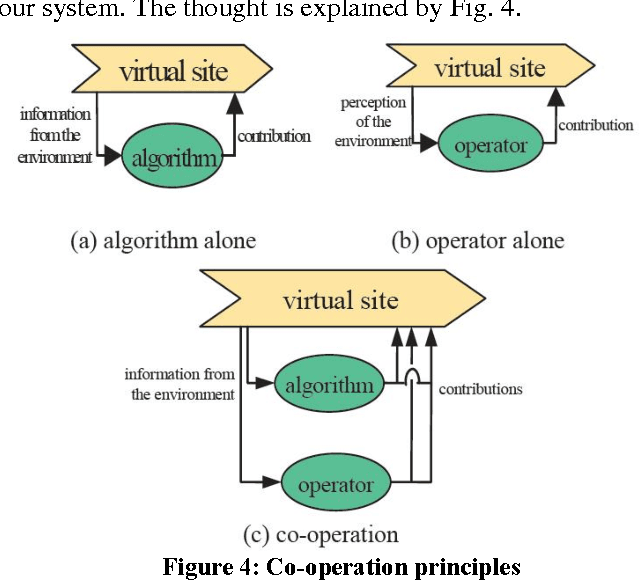
For industrial product design, it is very important to take into account assembly/disassembly and maintenance operations during the conceptual and prototype design stage. For these operations or other similar operations in a constrained environment, trajectory planning is always a critical and difficult issue for evaluating the design or for the users' convenience. In this paper, a customer-oriented approach is proposed to partially solve ergonomic issues encountered during the design stage of a constrained environment. A single objective optimization based method is taken from the literature to generate the trajectory in a constrained environment automatically. A motion capture based method assists to guide the trajectory planning interactively if a local minimum is encountered within the single objective optimization. At last, a multi-objective evaluation method is proposed to evaluate the operations generated by the algorithm