 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneric Semi-Supervised Adversarial Subject Translation for Sensor-Based Human Activity Recognition
Nov 11, 2020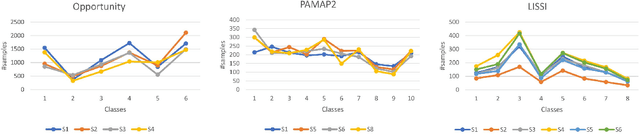
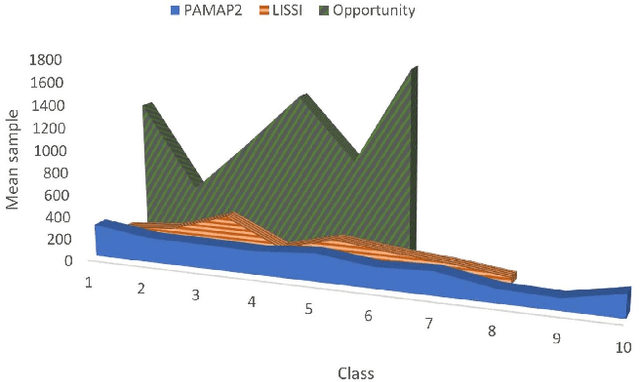
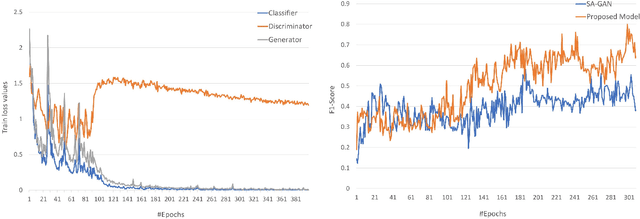
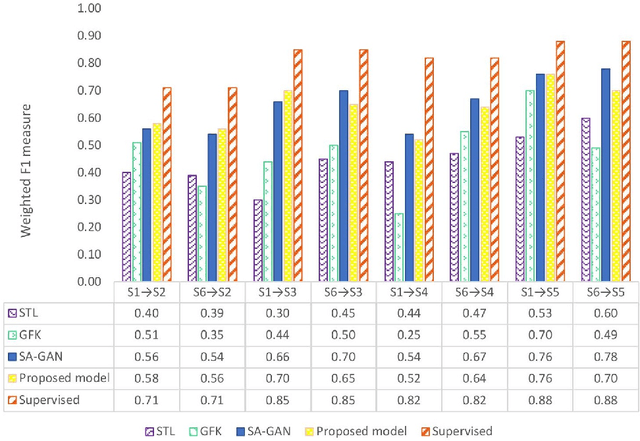
The performance of Human Activity Recognition (HAR) models, particularly deep neural networks, is highly contingent upon the availability of the massive amount of annotated training data which should be sufficiently labeled. Though, data acquisition and manual annotation in the HAR domain are prohibitively expensive due to skilled human resource requirements in both steps. Hence, domain adaptation techniques have been proposed to adapt the knowledge from the existing source of data. More recently, adversarial transfer learning methods have shown very promising results in image classification, yet limited for sensor-based HAR problems, which are still prone to the unfavorable effects of the imbalanced distribution of samples. This paper presents a novel generic and robust approach for semi-supervised domain adaptation in HAR, which capitalizes on the advantages of the adversarial framework to tackle the shortcomings, by leveraging knowledge from annotated samples exclusively from the source subject and unlabeled ones of the target subject. Extensive subject translation experiments are conducted on three large, middle, and small-size datasets with different levels of imbalance to assess the robustness and effectiveness of the proposed model to the scale as well as imbalance in the data. The results demonstrate the effectiveness of our proposed algorithms over state-of-the-art methods, which led in up to 13%, 4%, and 13% improvement of our high-level activities recognition metrics for Opportunity, LISSI, and PAMAP2 datasets, respectively. The LISSI dataset is the most challenging one owing to its less populated and imbalanced distribution. Compared to the SA-GAN adversarial domain adaptation method, the proposed approach enhances the final classification performance with an average of 7.5% for the three datasets, which emphasizes the effectiveness of micro-mini-batch training.
Deep HMResNet Model for Human Activity-Aware Robotic Systems
Oct 01, 2018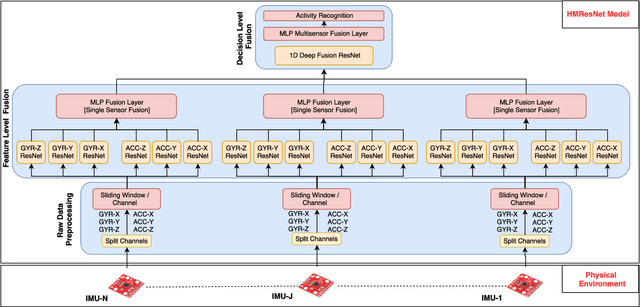
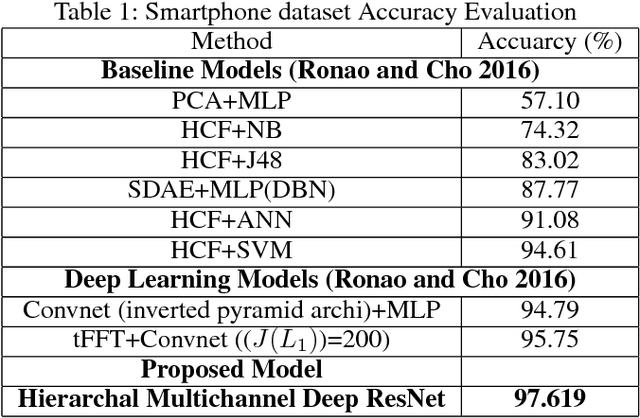
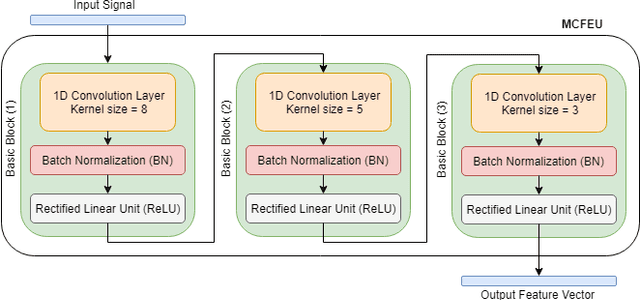
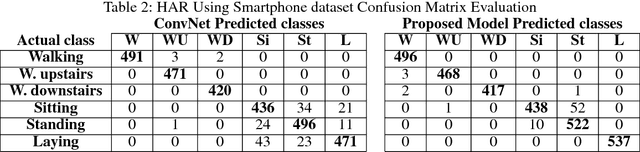
Endowing the robotic systems with cognitive capabilities for recognizing daily activities of humans is an important challenge, which requires sophisticated and novel approaches. Most of the proposed approaches explore pattern recognition techniques which are generally based on hand-crafted features or learned features. In this paper, a novel Hierarchal Multichannel Deep Residual Network (HMResNet) model is proposed for robotic systems to recognize daily human activities in the ambient environments. The introduced model is comprised of multilevel fusion layers. The proposed Multichannel 1D Deep Residual Network model is, at the features level, combined with a Bottleneck MLP neural network to automatically extract robust features regardless of the hardware configuration and, at the decision level, is fully connected with an MLP neural network to recognize daily human activities. Empirical experiments on real-world datasets and an online demonstration are used for validating the proposed model. Results demonstrated that the proposed model outperforms the baseline models in daily human activity recognition.
An Event Calculus Production Rule System for Reasoning in Dynamic and Uncertain Domains
Dec 16, 2015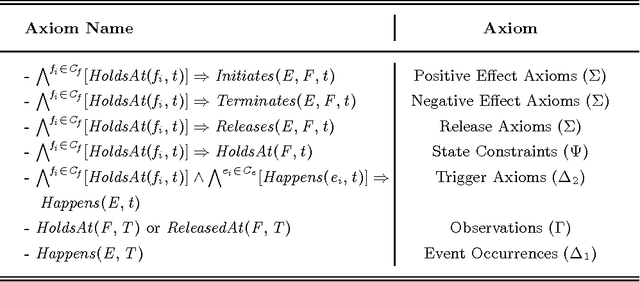
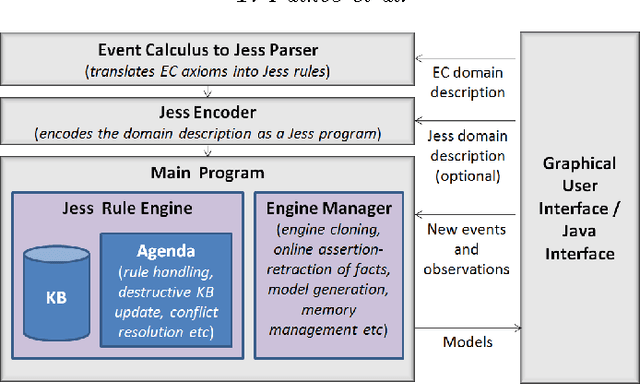
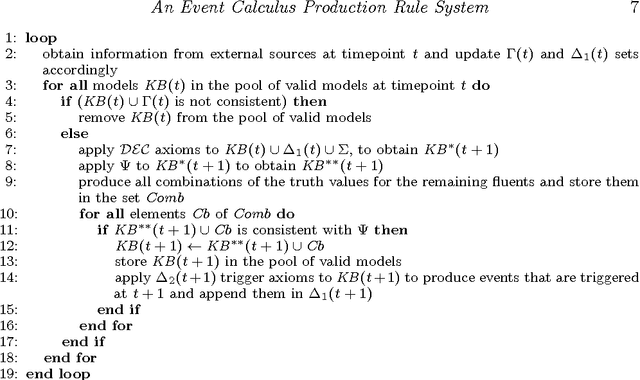
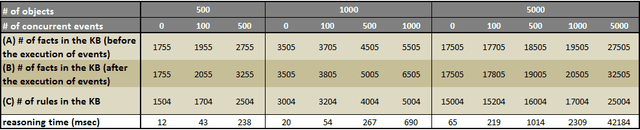
Action languages have emerged as an important field of Knowledge Representation for reasoning about change and causality in dynamic domains. This article presents Cerbere, a production system designed to perform online causal, temporal and epistemic reasoning based on the Event Calculus. The framework implements the declarative semantics of the underlying logic theories in a forward-chaining rule-based reasoning system, coupling the high expressiveness of its formalisms with the efficiency of rule-based systems. To illustrate its applicability, we present both the modeling of benchmark problems in the field, as well as its utilization in the challenging domain of smart spaces. A hybrid framework that combines logic-based with probabilistic reasoning has been developed, that aims to accommodate activity recognition and monitoring tasks in smart spaces. Under consideration in Theory and Practice of Logic Programming (TPLP)
* Under consideration in Theory and Practice of Logic Programming (TPLP)
An Unsupervised Approach for Automatic Activity Recognition based on Hidden Markov Model Regression
Dec 25, 2013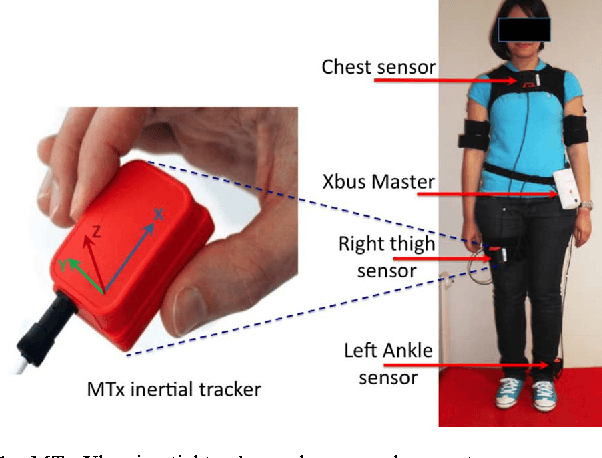
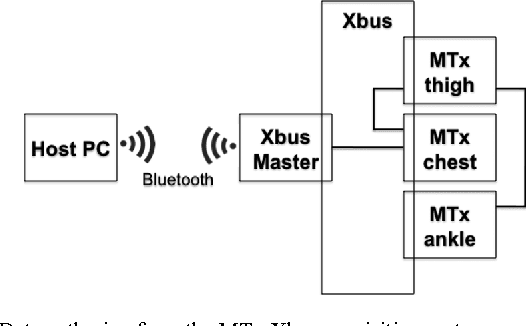
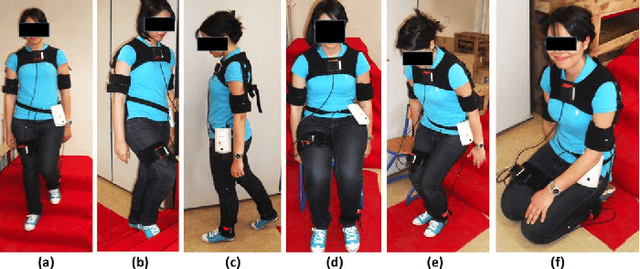
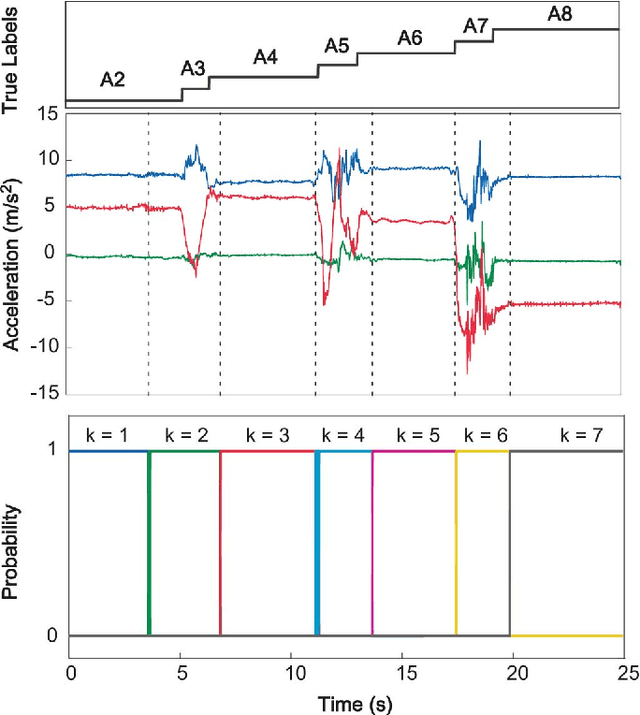
Using supervised machine learning approaches to recognize human activities from on-body wearable accelerometers generally requires a large amount of labelled data. When ground truth information is not available, too expensive, time consuming or difficult to collect, one has to rely on unsupervised approaches. This paper presents a new unsupervised approach for human activity recognition from raw acceleration data measured using inertial wearable sensors. The proposed method is based upon joint segmentation of multidimensional time series using a Hidden Markov Model (HMM) in a multiple regression context. The model is learned in an unsupervised framework using the Expectation-Maximization (EM) algorithm where no activity labels are needed. The proposed method takes into account the sequential appearance of the data. It is therefore adapted for the temporal acceleration data to accurately detect the activities. It allows both segmentation and classification of the human activities. Experimental results are provided to demonstrate the efficiency of the proposed approach with respect to standard supervised and unsupervised classification approaches
Joint segmentation of multivariate time series with hidden process regression for human activity recognition
Dec 25, 2013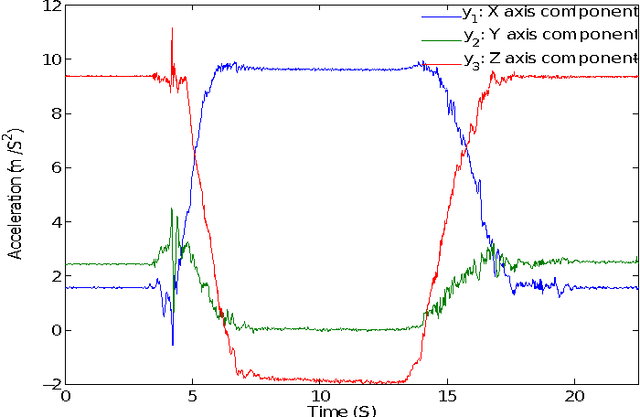
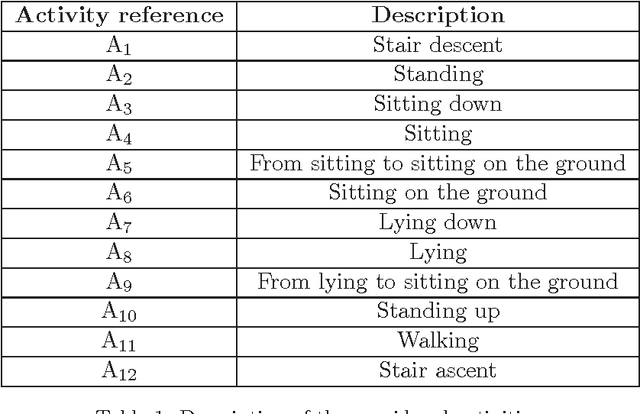
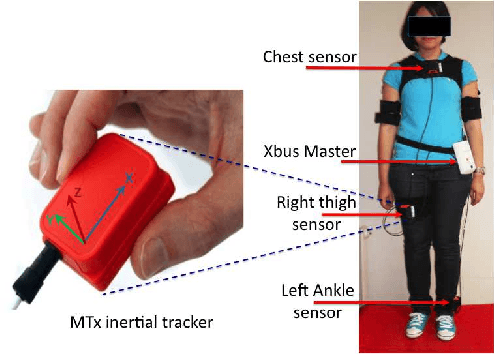
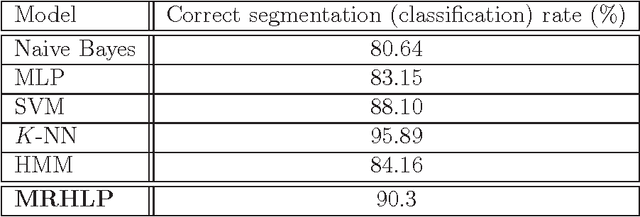
The problem of human activity recognition is central for understanding and predicting the human behavior, in particular in a prospective of assistive services to humans, such as health monitoring, well being, security, etc. There is therefore a growing need to build accurate models which can take into account the variability of the human activities over time (dynamic models) rather than static ones which can have some limitations in such a dynamic context. In this paper, the problem of activity recognition is analyzed through the segmentation of the multidimensional time series of the acceleration data measured in the 3-d space using body-worn accelerometers. The proposed model for automatic temporal segmentation is a specific statistical latent process model which assumes that the observed acceleration sequence is governed by sequence of hidden (unobserved) activities. More specifically, the proposed approach is based on a specific multiple regression model incorporating a hidden discrete logistic process which governs the switching from one activity to another over time. The model is learned in an unsupervised context by maximizing the observed-data log-likelihood via a dedicated expectation-maximization (EM) algorithm. We applied it on a real-world automatic human activity recognition problem and its performance was assessed by performing comparisons with alternative approaches, including well-known supervised static classifiers and the standard hidden Markov model (HMM). The obtained results are very encouraging and show that the proposed approach is quite competitive even it works in an entirely unsupervised way and does not requires a feature extraction preprocessing step.