 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep HMResNet Model for Human Activity-Aware Robotic Systems
Paper and Code
Oct 01, 2018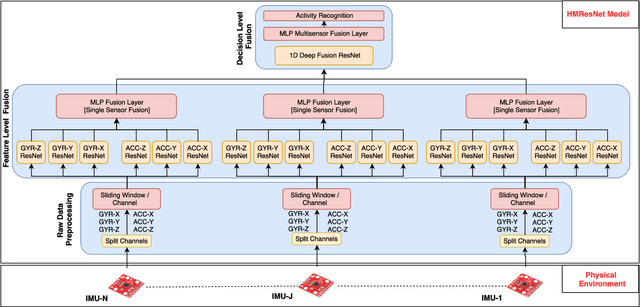
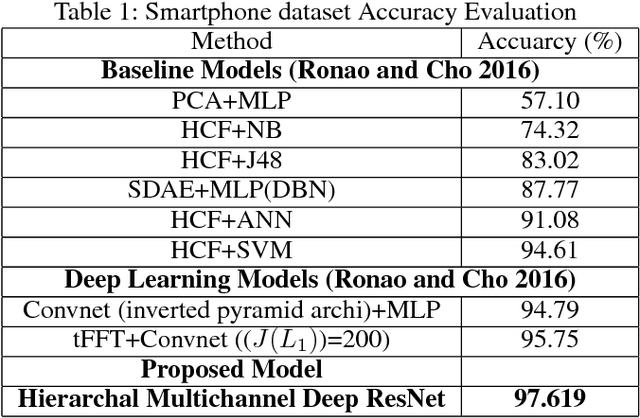
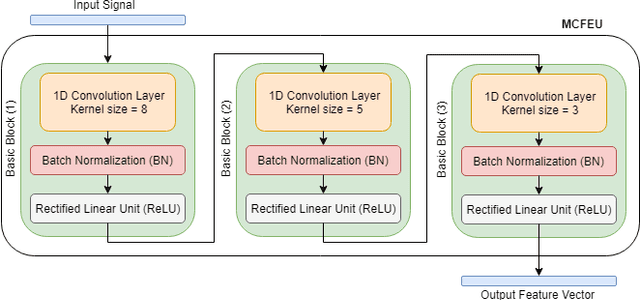
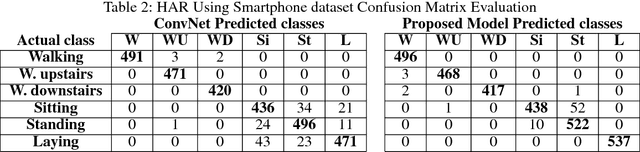
Endowing the robotic systems with cognitive capabilities for recognizing daily activities of humans is an important challenge, which requires sophisticated and novel approaches. Most of the proposed approaches explore pattern recognition techniques which are generally based on hand-crafted features or learned features. In this paper, a novel Hierarchal Multichannel Deep Residual Network (HMResNet) model is proposed for robotic systems to recognize daily human activities in the ambient environments. The introduced model is comprised of multilevel fusion layers. The proposed Multichannel 1D Deep Residual Network model is, at the features level, combined with a Bottleneck MLP neural network to automatically extract robust features regardless of the hardware configuration and, at the decision level, is fully connected with an MLP neural network to recognize daily human activities. Empirical experiments on real-world datasets and an online demonstration are used for validating the proposed model. Results demonstrated that the proposed model outperforms the baseline models in daily human activity recognition.