 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCroBIM-V: Memory-Quality Controlled Remote Sensing Referring Video Object Segmentation
Jan 17, 2026Remote sensing video referring object segmentation (RS-RVOS) is challenged by weak target saliency and severe visual information truncation in dynamic scenes, making it extremely difficult to maintain discriminative target representations during segmentation. Moreover, progress in this field is hindered by the absence of large-scale dedicated benchmarks, while existing models are often affected by biased initial memory construction that impairs accurate instance localization in complex scenarios, as well as indiscriminate memory accumulation that encodes noise from occlusions or misclassifications, leading to persistent error propagation. This paper advances RS-RVOS research through dual contributions in data and methodology. First, we construct RS-RVOS Bench, the first large-scale benchmark comprising 111 video sequences, about 25,000 frames, and 213,000 temporal referring annotations. Unlike common RVOS benchmarks where many expressions are written with access to the full video context, our dataset adopts a strict causality-aware annotation strategy in which linguistic references are generated solely from the target state in the initial frame. Second, we propose a memory-quality-aware online referring segmentation framework, termed Memory Quality Control with Segment Anything Model (MQC-SAM). MQC-SAM introduces a temporal motion consistency module for initial memory calibration, leveraging short-term motion trajectory priors to correct structural deviations and establish accurate memory anchoring. Furthermore, it incorporates a decoupled attention-based memory integration mechanism with dynamic quality assessment, selectively updating high-confidence semantic features while filtering unreliable information, thereby effectively preventing error accumulation and propagation. Extensive experiments on RS-RVOS Bench demonstrate that MQC-SAM achieves state-of-the-art performance.
Self Generated Wargame AI: Double Layer Agent Task Planning Based on Large Language Model
Dec 02, 2023The big language model represented by ChatGPT has had a disruptive impact on the field of artificial intelligence. But it mainly focuses on Natural language processing, speech recognition, machine learning and natural-language understanding. This paper innovatively applies the big language model to the field of intelligent decision-making, places the big language model in the decision-making center, and constructs an agent architecture with the big language model as the core. Based on this, it further proposes a two-layer agent task planning, issues and executes decision commands through the interaction of natural language, and carries out simulation verification through the wargame simulation environment. Through the game confrontation simulation experiment, it is found that the intelligent decision-making ability of the big language model is significantly stronger than the commonly used reinforcement learning AI and rule AI, and the intelligence, understandability and generalization are all better. And through experiments, it was found that the intelligence of the large language model is closely related to prompt. This work also extends the large language model from previous human-computer interaction to the field of intelligent decision-making, which has important reference value and significance for the development of intelligent decision-making.
Graphene-based Distributed 3D Sensing Electrodes for Mapping Spatiotemporal Auricular Physiological Signals
Jul 10, 2021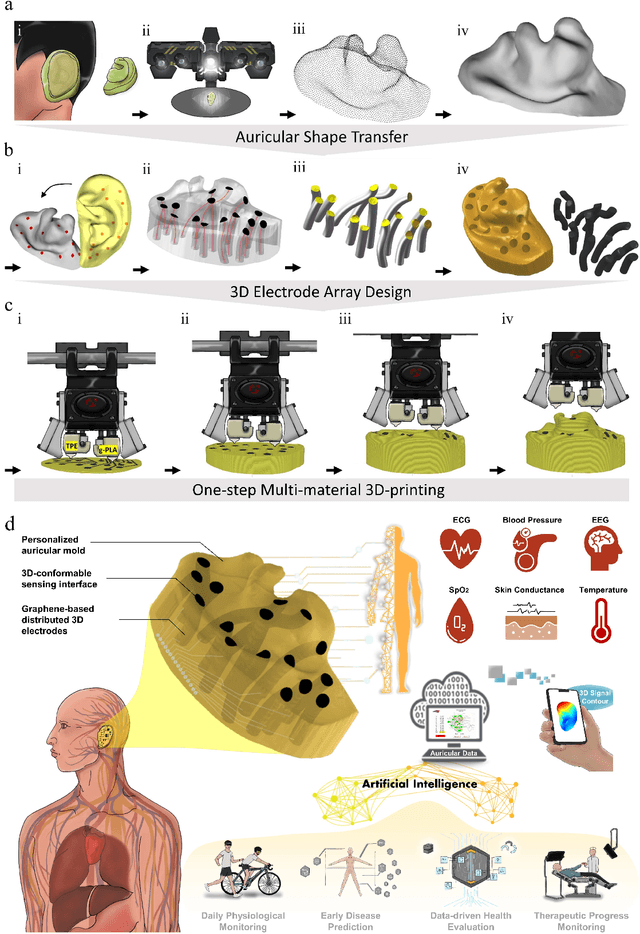
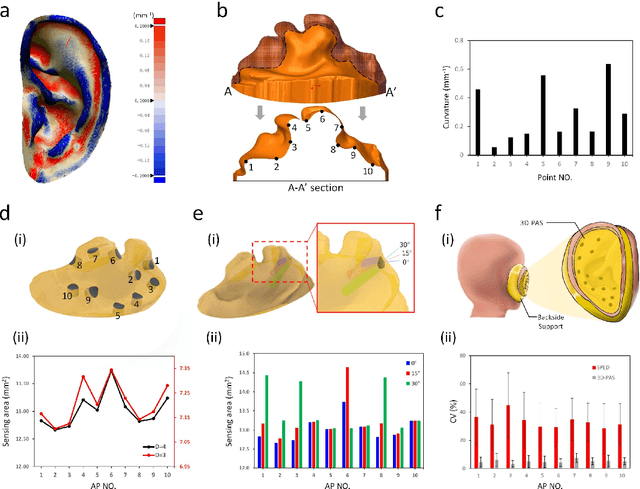
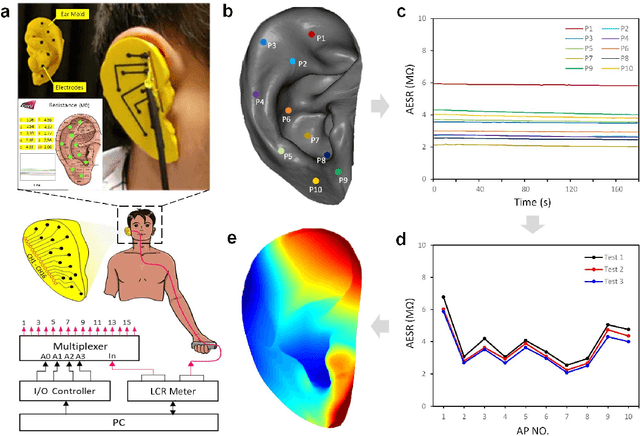
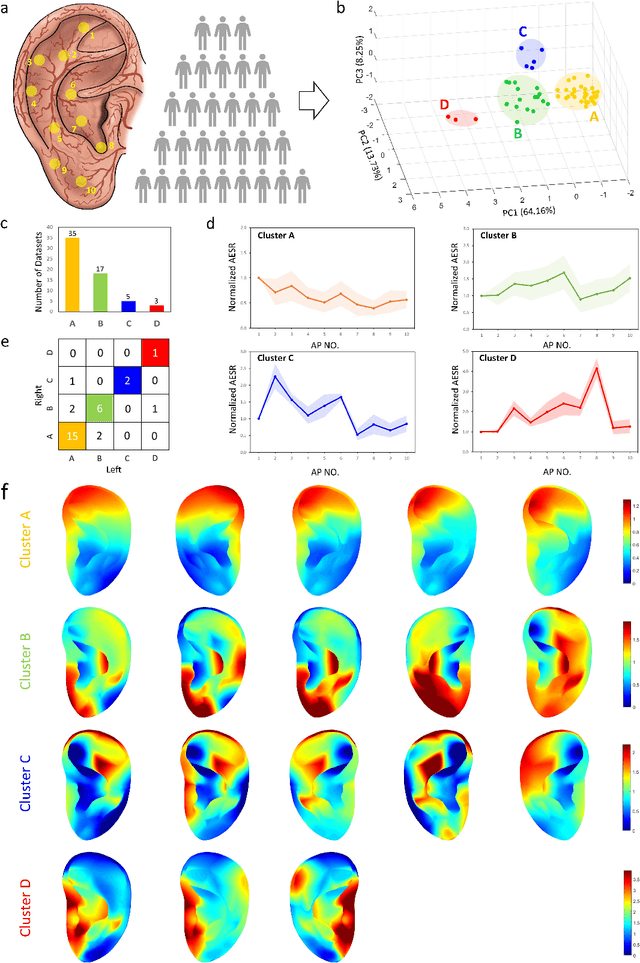
Underneath the ear skin there are richly branching vascular and neural networks that ultimately connecting to our heart and brain. Hence, the three-dimensional (3D) mapping of auricular electrophysiological signals could provide a new perspective for biomedical studies such as diagnosis of cardiovascular diseases and neurological disorders. However, it is still extremely challenging for current sensing techniques to cover the entire ultra-curved auricle. Here, we report a graphene-based ear-conformable sensing device with embedded and distributed 3D electrodes which enable full-auricle physiological monitoring. The sensing device, which incorporates programable 3D electrode thread array and personalized auricular mold, has 3D-conformable sensing interfaces with curved auricular skin, and was developed using one-step multi-material 3D-printing process. As a proof-of-concept, spatiotemporal auricular electrical skin resistance (AESR) mapping was demonstrated. For the first time, 3D AESR contours were generated and human subject-specific AESR distributions among a population were observed. From the data of 17 volunteers, the auricular region-specific AESR changes after cycling exercise were observed in 98% of the tests and were validated via machine learning techniques. Correlations of AESR with heart rate and blood pressure were also studied using statistical analysis. This 3D electronic platform and AESR-based new biometrical findings show promising biomedical applications.
Making Sense of the Robotized Pandemic Response: A Comparison of Global and Canadian Robot Deployments and Success Factors
Sep 21, 2020
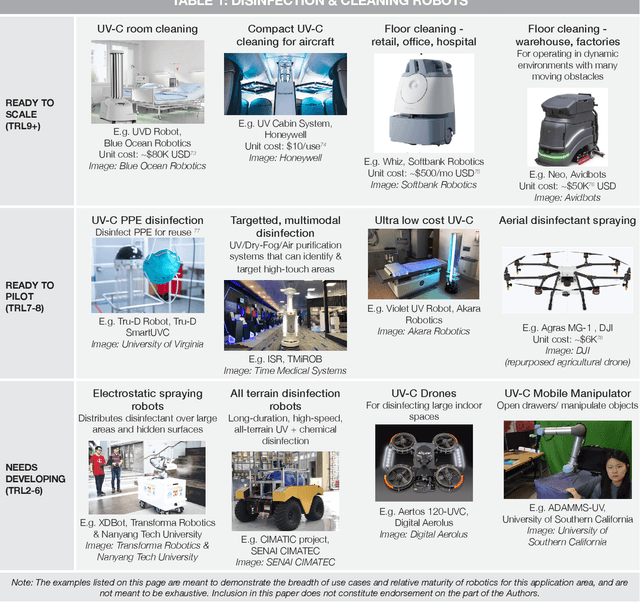
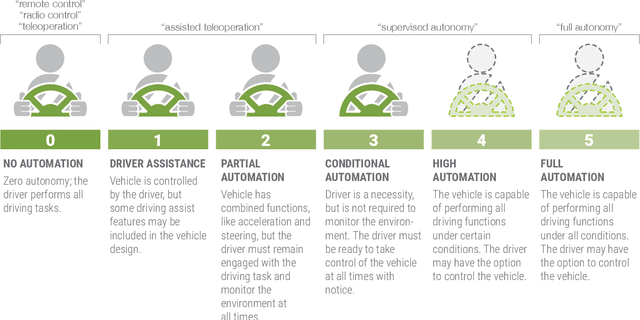
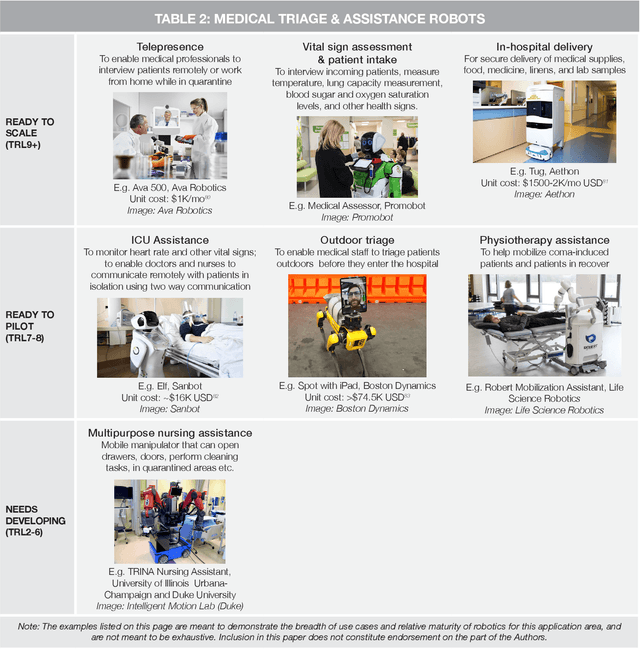
From disinfection and remote triage, to logistics and delivery, countries around the world are making use of robots to address the unique challenges presented by the COVID-19 pandemic. Robots are being used to manage the pandemic in Canada too, but relative to other regions, we have been more cautious in our adoption -- this despite the important role that robots of Canadian origin are now playing on the global stage. This white paper discusses why this is the case, and argues that strategic investment and support for the Canadian robotics industry are urgently needed to bring the benefits of robotics home, where we have more control in shaping the future of this game-changing technology. Such investments will not only serve to support Canada's current pandemic response and post pandemic recovery, but will also prepare this country to weather future crises. Without such support, Canada risks falling behind other developed nations that are investing heavily in hardware automation at this time.
A Geometric Blind Source Separation Method Based on Facet Component Analysis
Jan 02, 2013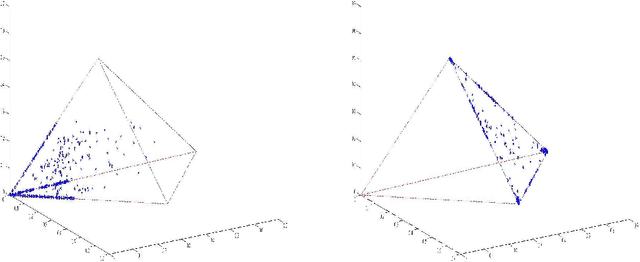
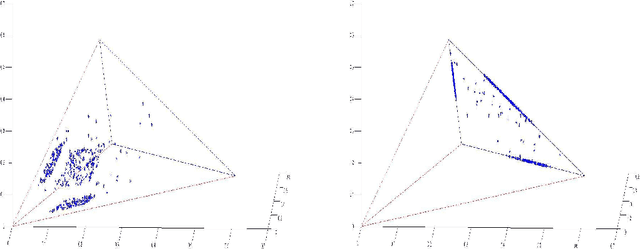

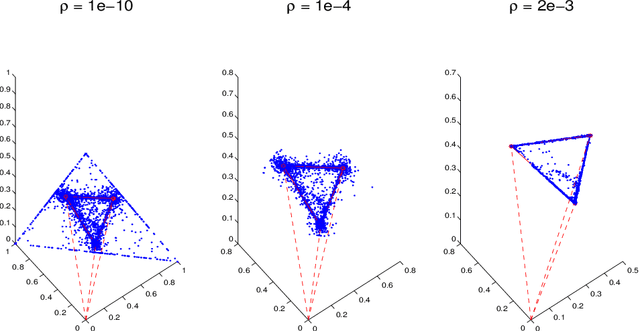
Given a set of mixtures, blind source separation attempts to retrieve the source signals without or with very little information of the the mixing process. We present a geometric approach for blind separation of nonnegative linear mixtures termed {\em facet component analysis} (FCA). The approach is based on facet identification of the underlying cone structure of the data. Earlier works focus on recovering the cone by locating its vertices (vertex component analysis or VCA) based on a mutual sparsity condition which requires each source signal to possess a stand-alone peak in its spectrum. We formulate alternative conditions so that enough data points fall on the facets of a cone instead of accumulating around the vertices. To find a regime of unique solvability, we make use of both geometric and density properties of the data points, and develop an efficient facet identification method by combining data classification and linear regression. For noisy data, we show that denoising methods may be employed, such as the total variation technique in imaging processing, and principle component analysis. We show computational results on nuclear magnetic resonance spectroscopic data to substantiate our method.