 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePR-NET: Leveraging Pathway Refined Network Structures for Prostate Cancer Patient Condition Prediction
Mar 12, 2024The diagnosis and monitoring of Castrate Resistant Prostate Cancer (CRPC) are crucial for cancer patients, but the current models (such as P-NET) have limitations in terms of parameter count, generalization, and cost. To address the issue, we develop a more accurate and efficient Prostate Cancer patient condition prediction model, named PR-NET. By compressing and optimizing the network structure of P-NET, the model complexity is reduced while maintaining high accuracy and interpretability. The PR-NET demonstrated superior performance in predicting prostate cancer patient outcomes, outshining P-NET and six other traditional models with a significant margin. In our rigorous evaluation, PR-NET not only achieved impressive average AUC and Recall scores of 0.94 and 0.83, respectively, on known data but also maintained robust generalizability on five unknown datasets with a higher average AUC of 0.73 and Recall of 0.72, compared to P-NET's 0.68 and 0.5. PR-NET's efficiency was evidenced by its shorter average training and inference times, and its gene-level analysis revealed 46 key genes, demonstrating its enhanced predictive power and efficiency in identifying critical biomarkers for prostate cancer. Future research can further expand its application domains and optimize the model's performance and reliability.
Robotic Barrier Construction through Weaved, Inflatable Tubes
Oct 29, 2023



In this article, we present a mechanism and related path planning algorithm to construct light-duty barriers out of extruded, inflated tubes weaved around existing environmental features. Our extruded tubes are based on everted vine-robots and in this context, we present a new method to steer their growth. We characterize the mechanism in terms of accuracy resilience, and, towards their use as barriers, the ability of the tubes to withstand distributed loads. We further explore an algorithm which, given a feature map and the size and direction of the external load, can determine where and how to extrude the barrier. Finally, we showcase the potential of this method in an autonomously extruded two-layer wall weaved around three pipes. While preliminary, our work indicates that this method has the potential for barrier construction in cluttered environments, e.g. shelters against wind or snow. Future work may show how to achieve tighter weaves, how to leverage weave friction for improved strength, how to assess barrier performance for feedback control, and how to operate the extrusion mechanism off of a mobile robot.
DeepDDS: deep graph neural network with attention mechanism to predict synergistic drug combinations
Jul 06, 2021Drug combination therapy has become a increasingly promising method in the treatment of cancer. However, the number of possible drug combinations is so huge that it is hard to screen synergistic drug combinations through wet-lab experiments. Therefore, computational screening has become an important way to prioritize drug combinations. Graph neural network have recently shown remarkable performance in the prediction of compound-protein interactions, but it has not been applied to the screening of drug combinations. In this paper, we proposed a deep learning model based on graph neural networks and attention mechanism to identify drug combinations that can effectively inhibit the viability of specific cancer cells. The feature embeddings of drug molecule structure and gene expression profiles were taken as input to multi-layer feedforward neural network to identify the synergistic drug combinations. We compared DeepDDS with classical machine learning methods and other deep learning-based methods on benchmark data set, and the leave-one-out experimental results showed that DeepDDS achieved better performance than competitive methods. Also, on an independent test set released by well-known pharmaceutical enterprise AstraZeneca, DeepDDS was superior to competitive methods by more than 16\% predictive precision. Furthermore, we explored the interpretability of the graph attention network, and found the correlation matrix of atomic features revealed important chemical substructures of drugs. We believed that DeepDDS is an effective tool that prioritized synergistic drug combinations for further wet-lab experiment validation.
Machine Learning Empowered Resource Allocation in IRS Aided MISO-NOMA Networks
Mar 09, 2021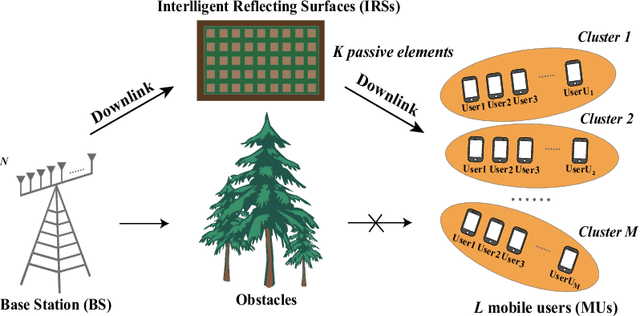
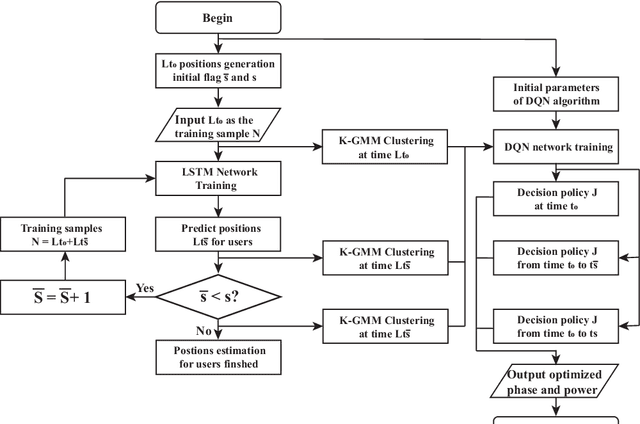
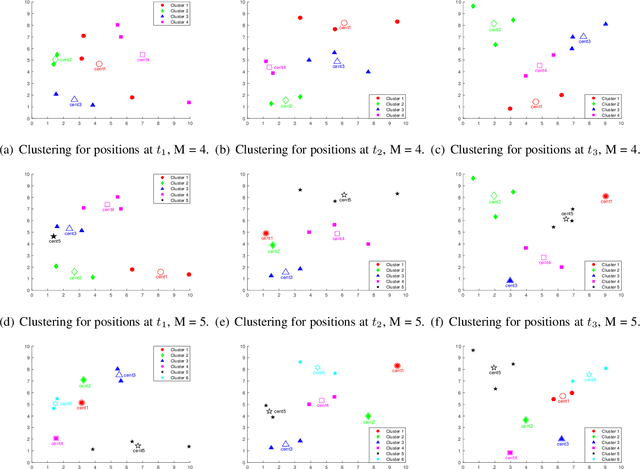
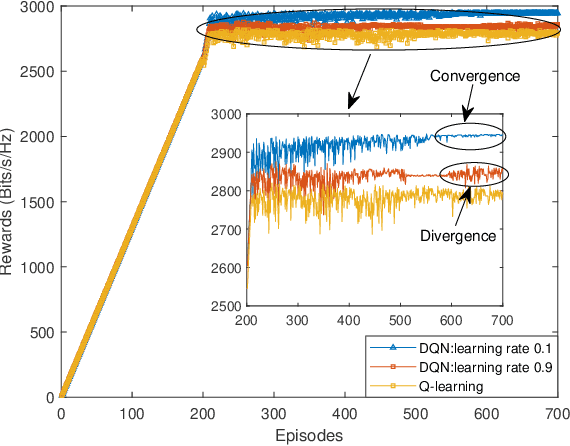
A novel framework of intelligent reflecting surface (IRS)-aided multiple-input single-output (MISO) non-orthogonal multiple access (NOMA) network is proposed, where a base station (BS) serves multiple clusters with unfixed number of users in each cluster. The goal is to maximize the sum rate of all users by jointly optimizing the passive beamforming vector at the IRS, decoding order, power allocation coefficient vector and number of clusters, subject to the rate requirements of users. In order to tackle the formulated problem, a three-step approach is proposed. More particularly, a long short-term memory (LSTM) based algorithm is first adopted for predicting the mobility of users. Secondly, a K-means based Gaussian mixture model (K-GMM) algorithm is proposed for user clustering. Thirdly, a deep Q-network (DQN) based algorithm is invoked for jointly determining the phase shift matrix and power allocation policy. Simulation results are provided for demonstrating that the proposed algorithm outperforms the benchmarks, while the throughput gain of 35% can be achieved by invoking NOMA technique instead of orthogonal multiple access (OMA).
Making Sense of the Robotized Pandemic Response: A Comparison of Global and Canadian Robot Deployments and Success Factors
Sep 21, 2020
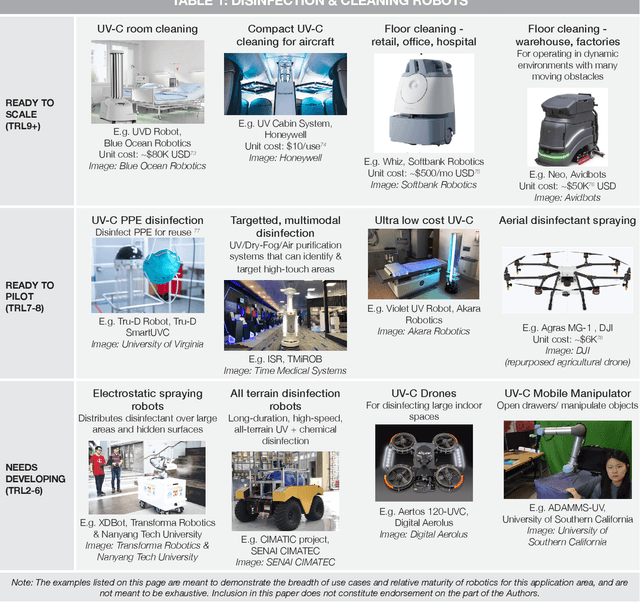
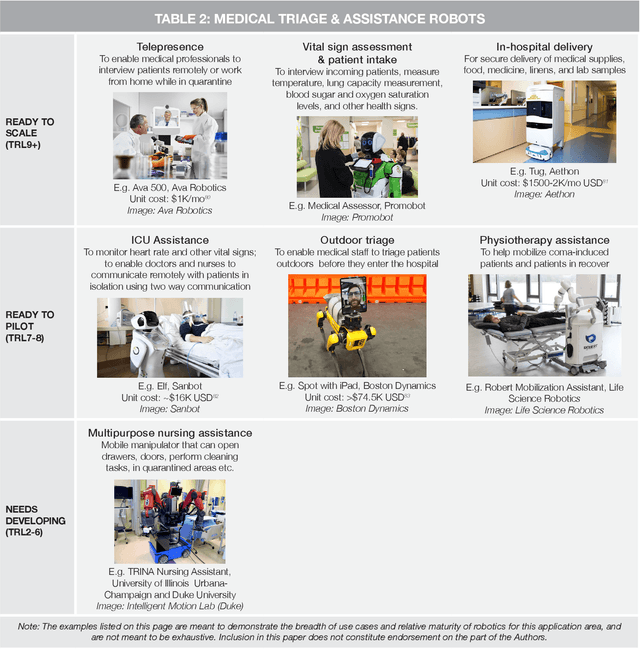
From disinfection and remote triage, to logistics and delivery, countries around the world are making use of robots to address the unique challenges presented by the COVID-19 pandemic. Robots are being used to manage the pandemic in Canada too, but relative to other regions, we have been more cautious in our adoption -- this despite the important role that robots of Canadian origin are now playing on the global stage. This white paper discusses why this is the case, and argues that strategic investment and support for the Canadian robotics industry are urgently needed to bring the benefits of robotics home, where we have more control in shaping the future of this game-changing technology. Such investments will not only serve to support Canada's current pandemic response and post pandemic recovery, but will also prepare this country to weather future crises. Without such support, Canada risks falling behind other developed nations that are investing heavily in hardware automation at this time.
A Nonparametric Approach to 3D Shape Analysis from Digital Camera Images - I. in Memory of W.P. Dayawansa
Jun 05, 2008

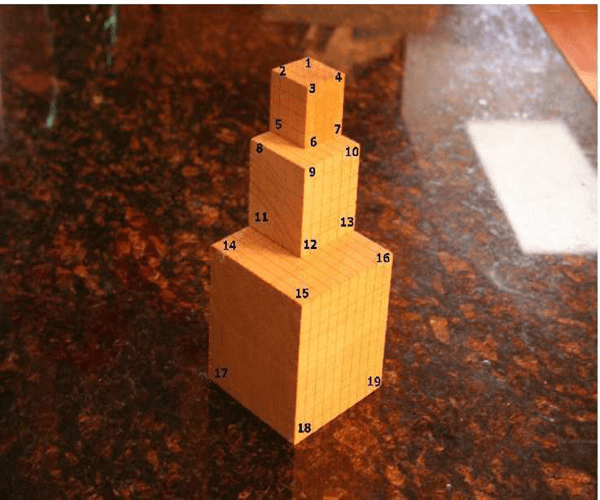
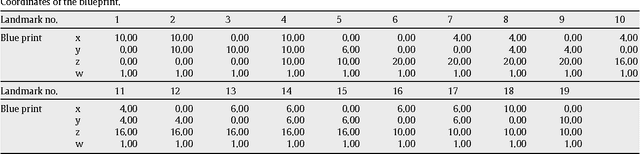
In this article, for the first time, one develops a nonparametric methodology for an analysis of shapes of configurations of landmarks on real 3D objects from regular camera photographs, thus making 3D shape analysis very accessible. A fundamental result in computer vision by Faugeras (1992), Hartley, Gupta and Chang (1992) is that generically, a finite 3D configuration of points can be retrieved up to a projective transformation, from corresponding configurations in a pair of camera images. Consequently, the projective shape of a 3D configuration can be retrieved from two of its planar views. Given the inherent registration errors, the 3D projective shape can be estimated from a sample of photos of the scene containing that configuration. Projective shapes are here regarded as points on projective shape manifolds. Using large sample and nonparametric bootstrap methodology for extrinsic means on manifolds, one gives confidence regions and tests for the mean projective shape of a 3D configuration from its 2D camera images.