 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepDDS: deep graph neural network with attention mechanism to predict synergistic drug combinations
Jul 06, 2021Drug combination therapy has become a increasingly promising method in the treatment of cancer. However, the number of possible drug combinations is so huge that it is hard to screen synergistic drug combinations through wet-lab experiments. Therefore, computational screening has become an important way to prioritize drug combinations. Graph neural network have recently shown remarkable performance in the prediction of compound-protein interactions, but it has not been applied to the screening of drug combinations. In this paper, we proposed a deep learning model based on graph neural networks and attention mechanism to identify drug combinations that can effectively inhibit the viability of specific cancer cells. The feature embeddings of drug molecule structure and gene expression profiles were taken as input to multi-layer feedforward neural network to identify the synergistic drug combinations. We compared DeepDDS with classical machine learning methods and other deep learning-based methods on benchmark data set, and the leave-one-out experimental results showed that DeepDDS achieved better performance than competitive methods. Also, on an independent test set released by well-known pharmaceutical enterprise AstraZeneca, DeepDDS was superior to competitive methods by more than 16\% predictive precision. Furthermore, we explored the interpretability of the graph attention network, and found the correlation matrix of atomic features revealed important chemical substructures of drugs. We believed that DeepDDS is an effective tool that prioritized synergistic drug combinations for further wet-lab experiment validation.
The Expected Jacobian Outerproduct: Theory and Empirics
Jun 05, 2020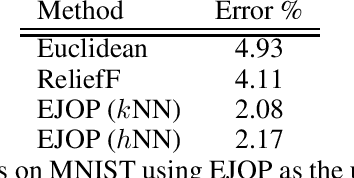
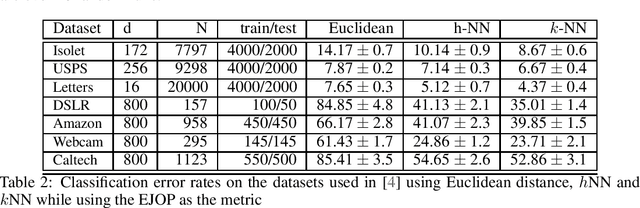
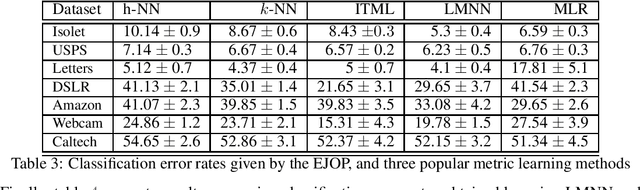
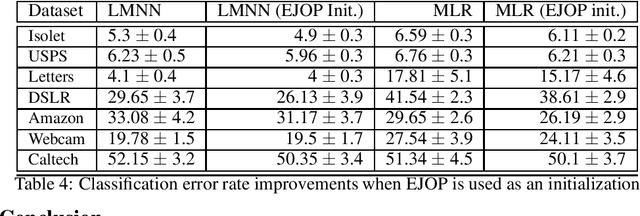
The expected gradient outerproduct (EGOP) of an unknown regression function is an operator that arises in the theory of multi-index regression, and is known to recover those directions that are most relevant to predicting the output. However, work on the EGOP, including that on its cheap estimators, is restricted to the regression setting. In this work, we adapt this operator to the multi-class setting, which we dub the expected Jacobian outerproduct (EJOP). Moreover, we propose a simple rough estimator of the EJOP and show that somewhat surprisingly, it remains statistically consistent under mild assumptions. Furthermore, we show that the eigenvalues and eigenspaces also remain consistent. Finally, we show that the estimated EJOP can be used as a metric to yield improvements in real-world non-parametric classification tasks: both by its use as a metric, and also as cheap initialization in metric learning tasks.
A semi-holographic hyperdimensional representation system for hardware-friendly cognitive computing
Jul 15, 2019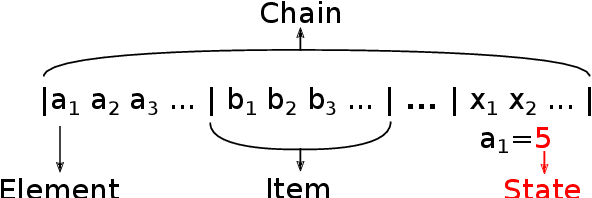
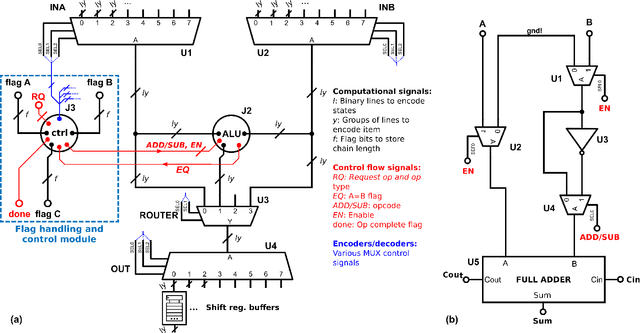
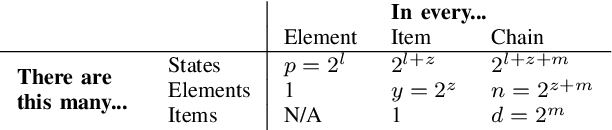
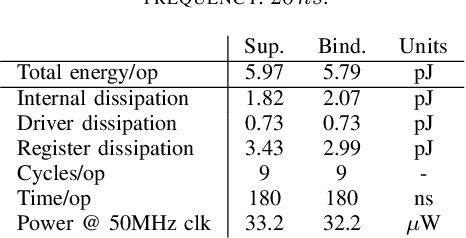
One of the main, long-term objectives of artificial intelligence is the creation of thinking machines. To that end, substantial effort has been placed into designing cognitive systems; i.e. systems that can manipulate semantic-level information. A substantial part of that effort is oriented towards designing the mathematical machinery underlying cognition in a way that is very efficiently implementable in hardware. In this work we propose a 'semi-holographic' representation system that can be implemented in hardware using only multiplexing and addition operations, thus avoiding the need for expensive multiplication. The resulting architecture can be readily constructed by recycling standard microprocessor elements and is capable of performing two key mathematical operations frequently used in cognition, superposition and binding, within a budget of below 6 pJ for 64- bit operands. Our proposed 'cognitive processing unit' (CoPU) is intended as just one (albeit crucial) part of much larger cognitive systems where artificial neural networks of all kinds and associative memories work in concord to give rise to intelligence.
Autonomous Locomotion Mode Transition Simulation of a Track-legged Quadruped Robot Step Negotiation
May 10, 2019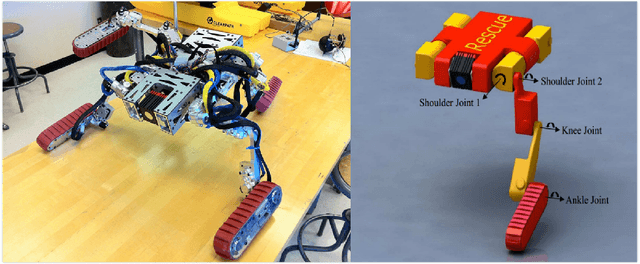
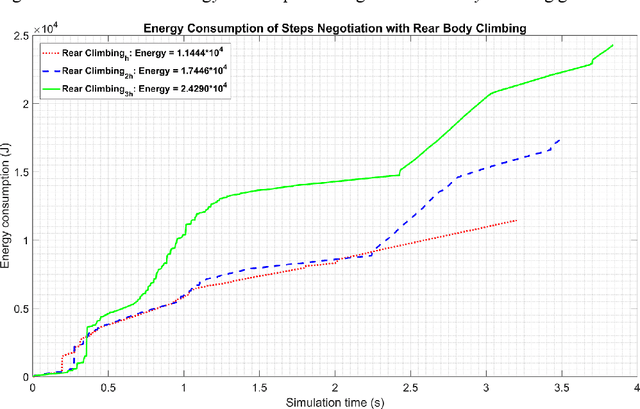
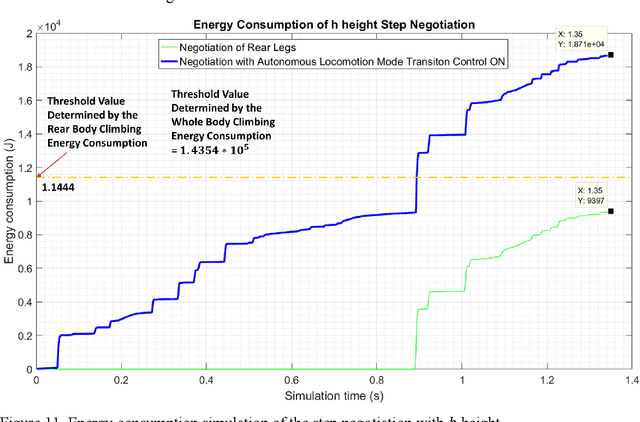
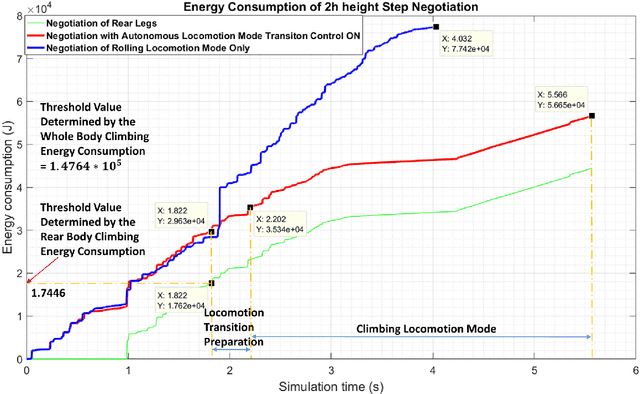
Multi-modal locomotion (e.g. terrestrial, aerial, and aquatic) is gaining increasing interest in robotics research as it improves the robots environmental adaptability, locomotion versatility, and operational flexibility. Within the terrestrial multiple locomotion robots, the advantage of hybrid robots stems from their multiple (two or more) locomotion modes, among which robots can select from depending on the encountering terrain conditions. However, there are many challenges in improving the autonomy of the locomotion mode transition between their multiple locomotion modes. This work proposed a method to realize an autonomous locomotion mode transition of a track-legged quadruped robot steps negotiation. The autonomy of the decision-making process was realized by the proposed criterion to comparing energy performances of the rolling and walking locomotion modes. Two climbing gaits were proposed to achieve smooth steps negotiation behaviours for energy evaluation purposes. Simulations showed autonomous locomotion mode transitions were realized for negotiations of steps with different height. The proposed method is generic enough to be utilized to other hybrid robots after some pre-studies of their locomotion energy performances.