 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf Generated Wargame AI: Double Layer Agent Task Planning Based on Large Language Model
Dec 02, 2023The big language model represented by ChatGPT has had a disruptive impact on the field of artificial intelligence. But it mainly focuses on Natural language processing, speech recognition, machine learning and natural-language understanding. This paper innovatively applies the big language model to the field of intelligent decision-making, places the big language model in the decision-making center, and constructs an agent architecture with the big language model as the core. Based on this, it further proposes a two-layer agent task planning, issues and executes decision commands through the interaction of natural language, and carries out simulation verification through the wargame simulation environment. Through the game confrontation simulation experiment, it is found that the intelligent decision-making ability of the big language model is significantly stronger than the commonly used reinforcement learning AI and rule AI, and the intelligence, understandability and generalization are all better. And through experiments, it was found that the intelligence of the large language model is closely related to prompt. This work also extends the large language model from previous human-computer interaction to the field of intelligent decision-making, which has important reference value and significance for the development of intelligent decision-making.
Volumetric Image Projection Super-Resolution Ultrasound (VIP-SR) with a 1D Unfocused Linear Array
Jun 08, 2022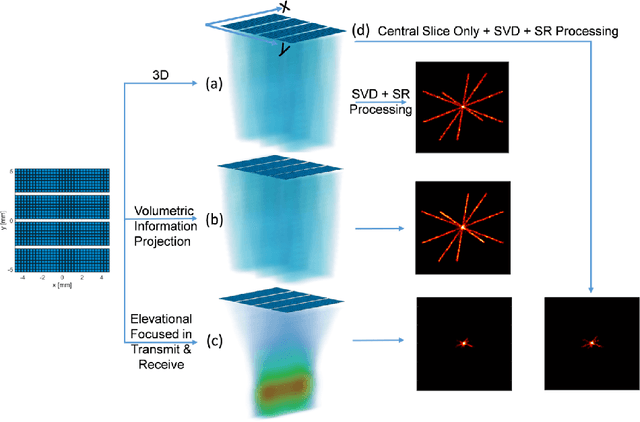
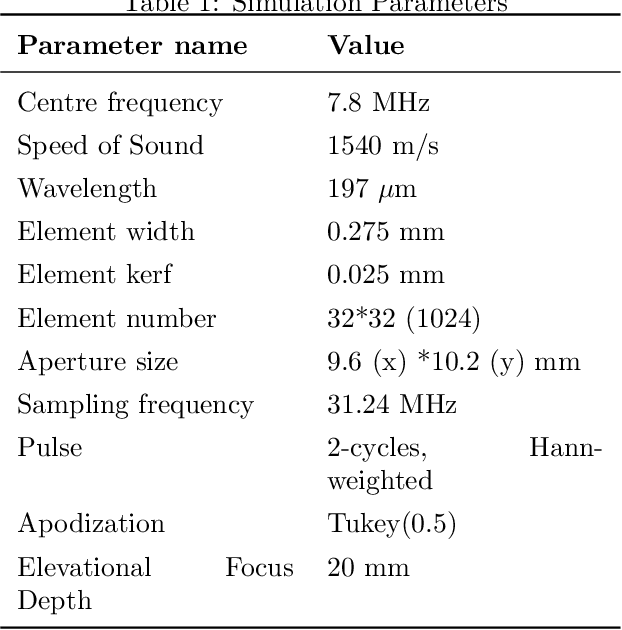
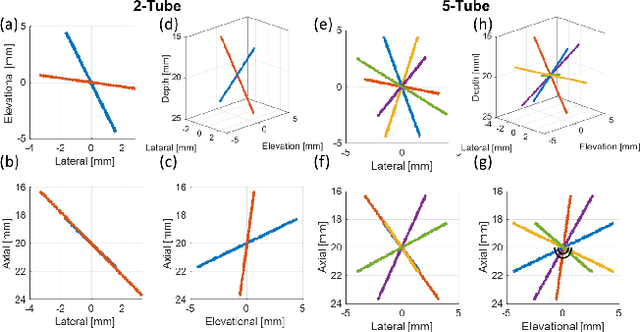
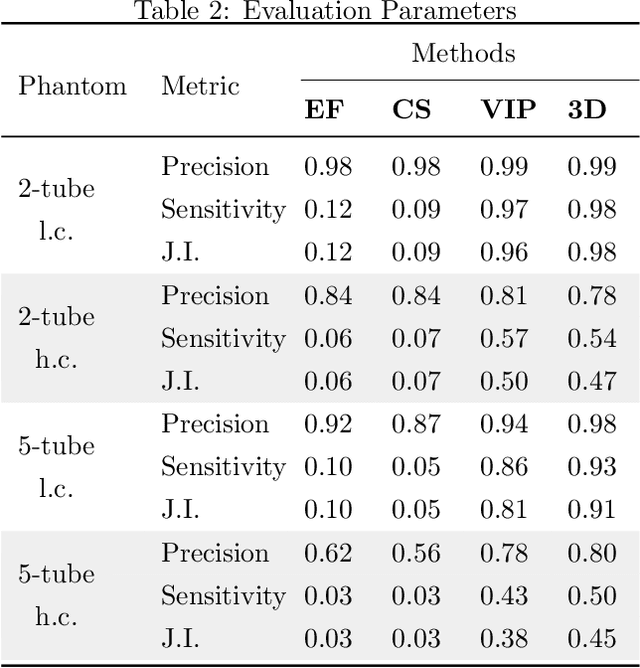
Super-Resolution Ultrasound (SRUS) through localizing spatially isolated microbubbles has been demonstrated to overcome the wave diffraction limit and reveal the microvascular structure and flow information at the microscopic scale. However, 3D SRUS imaging remains a challenge due to the fabrication and computational complexity of 2D matrix array probes and connections. Inspired by X-ray radiography which can present volumetric information in a single projection image with much simpler hardware than X-ray CT, this study investigates the feasibility of volumetric image projection super-resolution (VIP-SR) ultrasound using a 1D unfocused linear array. Both simulation and experiments were conducted on 3D microvessel phantoms using a 1D linear array with or without an elevational focus, and a 2D matrix array as the reference. Results show that, VIP-SR, using an unfocused 1D array probe can capture significantly more volumetric information than the conventional 1D elevational focused probe. Compared with the 2D projection image of the full 3D SRUS results using the 2D array probe with the same aperture size, VIP-SR has similar volumetric coverage using 32 folds less independent elements. The impact of bubble concentration and vascular density on the VIP-SR US was also investigated. This study demonstrates the ability of high-resolution volumetric imaging of microvascular structures at significantly reduced costs with VIP-SR.
Reinforcement Learning and Control of a Lower Extremity Exoskeleton for Squat Assistance
May 07, 2021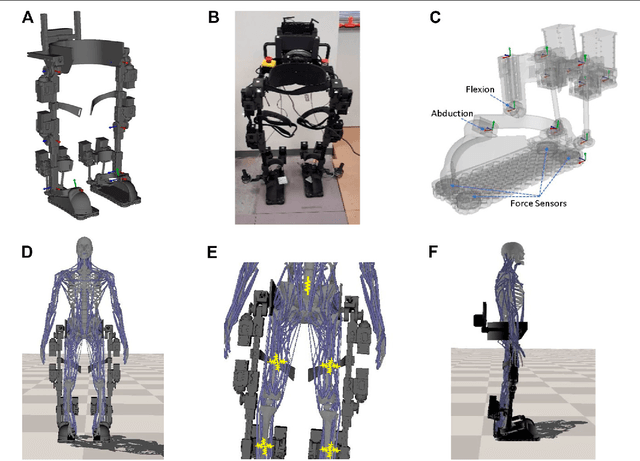
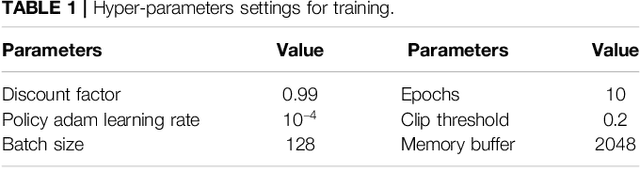
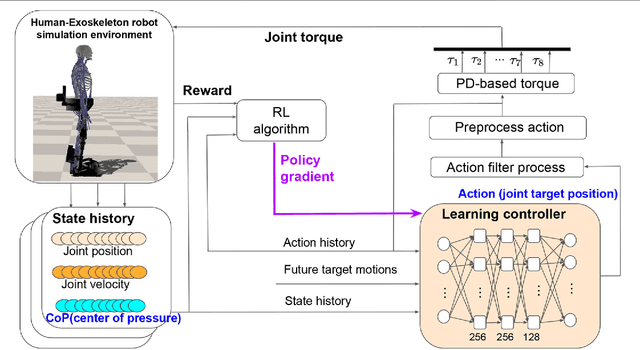
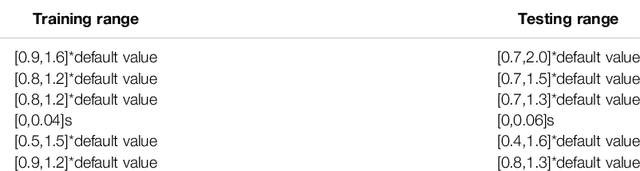
A significant challenge for the control of a robotic lower extremity rehabilitation exoskeleton is to ensure stability and robustness during programmed tasks or motions, which is crucial for the safety of the mobility-impaired user. Due to various levels of the user's disability, the human-exoskeleton interaction forces and external perturbations are unpredictable and could vary substantially and cause conventional motion controllers to behave unreliably or the robot to fall down. In this work, we propose a new, reinforcement learning-based, motion controller for a lower extremity rehabilitation exoskeleton, aiming to perform collaborative squatting exercises with efficiency, stability, and strong robustness. Unlike most existing rehabilitation exoskeletons, our exoskeleton has ankle actuation on both sagittal and front planes and is equipped with multiple foot force sensors to estimate center of pressure (CoP), an important indicator of system balance. This proposed motion controller takes advantage of the CoP information by incorporating it in the state input of the control policy network and adding it to the reward during the learning to maintain a well balanced system state during motions. In addition, we use dynamics randomization and adversary force perturbations including large human interaction forces during the training to further improve control robustness. To evaluate the effectiveness of the learning controller, we conduct numerical experiments with different settings to demonstrate its remarkable ability on controlling the exoskeleton to repetitively perform well balanced and robust squatting motions under strong perturbations and realistic human interaction forces.