 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Point Processes using Recurrent Graph Network
Aug 11, 2022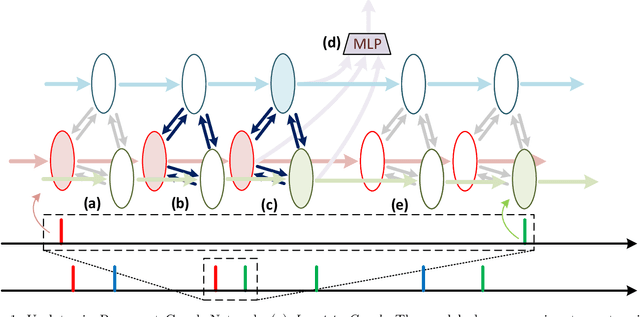
We present a novel Recurrent Graph Network (RGN) approach for predicting discrete marked event sequences by learning the underlying complex stochastic process. Using the framework of Point Processes, we interpret a marked discrete event sequence as the superposition of different sequences each of a unique type. The nodes of the Graph Network use LSTM to incorporate past information whereas a Graph Attention Network (GAT Network) introduces strong inductive biases to capture the interaction between these different types of events. By changing the self-attention mechanism from attending over past events to attending over event types, we obtain a reduction in time and space complexity from $\mathcal{O}(N^2)$ (total number of events) to $\mathcal{O}(|\mathcal{Y}|^2)$ (number of event types). Experiments show that the proposed approach improves performance in log-likelihood, prediction and goodness-of-fit tasks with lower time and space complexity compared to state-of-the art Transformer based architectures.
A Fully Spiking Hybrid Neural Network for Energy-Efficient Object Detection
Apr 21, 2021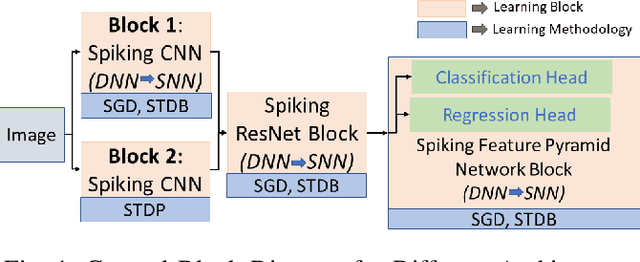
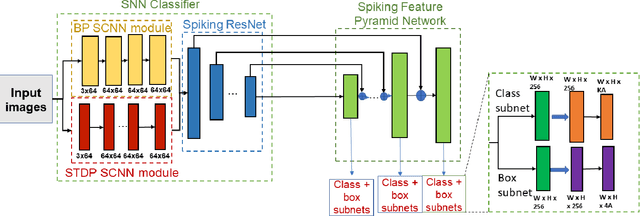
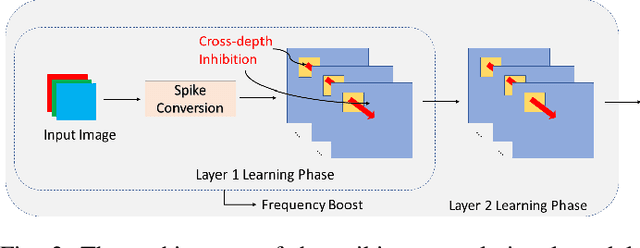
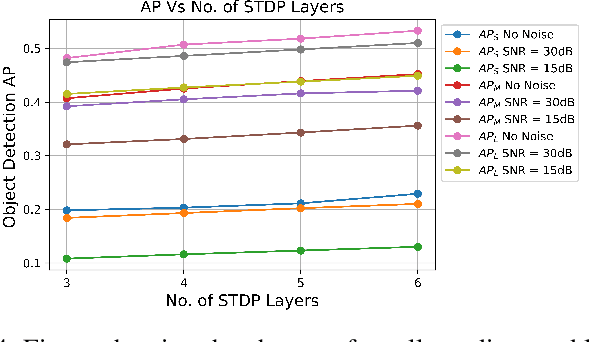
This paper proposes a Fully Spiking Hybrid Neural Network (FSHNN) for energy-efficient and robust object detection in resource-constrained platforms. The network architecture is based on Convolutional SNN using leaky-integrate-fire neuron models. The model combines unsupervised Spike Time-Dependent Plasticity (STDP) learning with back-propagation (STBP) learning methods and also uses Monte Carlo Dropout to get an estimate of the uncertainty error. FSHNN provides better accuracy compared to DNN based object detectors while being 150X energy-efficient. It also outperforms these object detectors, when subjected to noisy input data and less labeled training data with a lower uncertainty error.
Improving Robustness of ReRAM-based Spiking Neural Network Accelerator with Stochastic Spike-timing-dependent-plasticity
Sep 11, 2019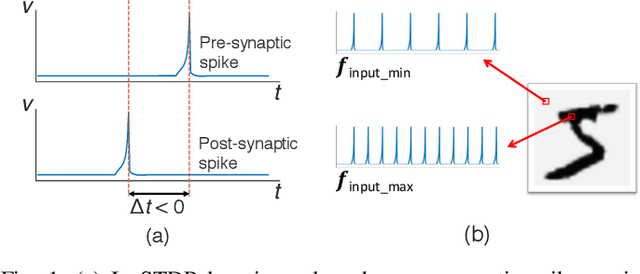
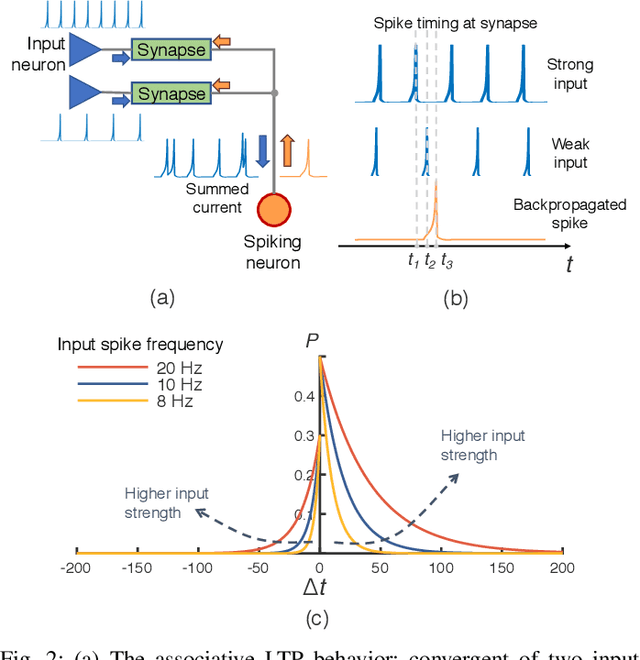
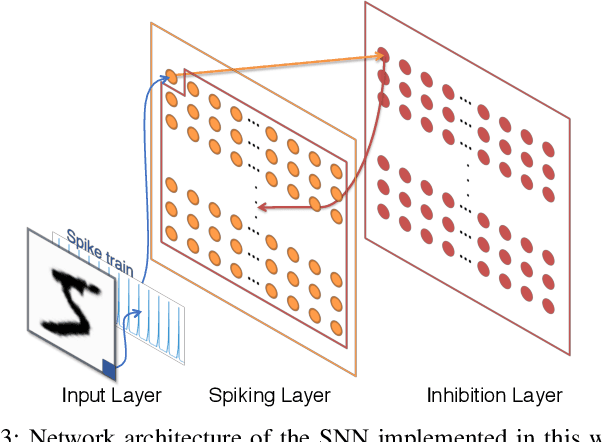
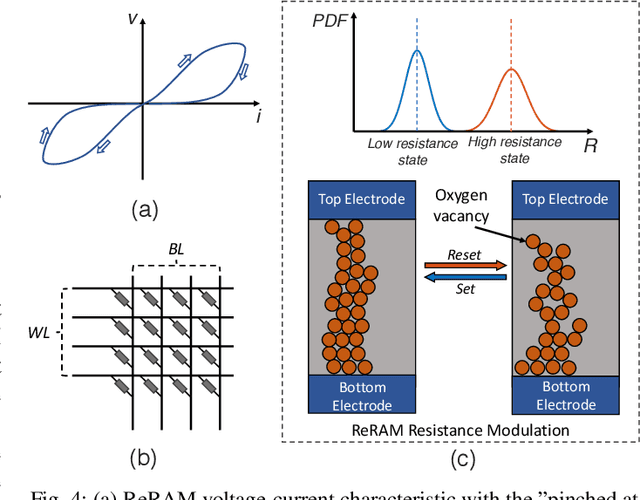
Spike-timing-dependent-plasticity (STDP) is an unsupervised learning algorithm for spiking neural network (SNN), which promises to achieve deeper understanding of human brain and more powerful artificial intelligence. While conventional computing system fails to simulate SNN efficiently, process-in-memory (PIM) based on devices such as ReRAM can be used in designing fast and efficient STDP based SNN accelerators, as it operates in high resemblance with biological neural network. However, the real-life implementation of such design still suffers from impact of input noise and device variation. In this work, we present a novel stochastic STDP algorithm that uses spiking frequency information to dynamically adjust synaptic behavior. The algorithm is tested in pattern recognition task with noisy input and shows accuracy improvement over deterministic STDP. In addition, we show that the new algorithm can be used for designing a robust ReRAM based SNN accelerator that has strong resilience to device variation.
ScieNet: Deep Learning with Spike-assisted Contextual Information Extraction
Sep 11, 2019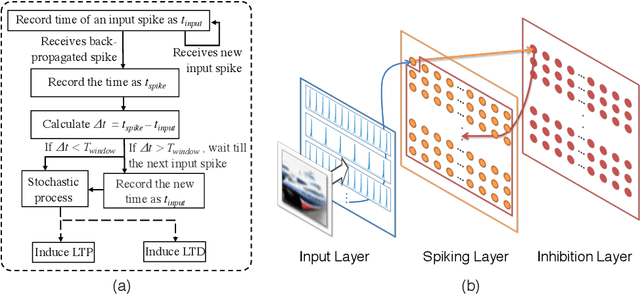
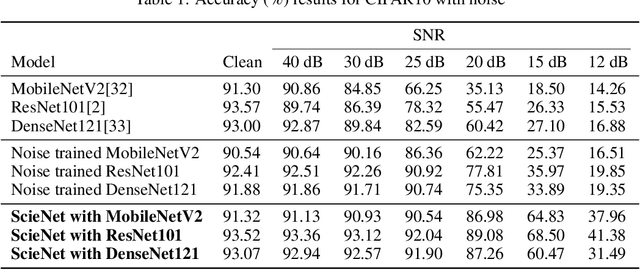
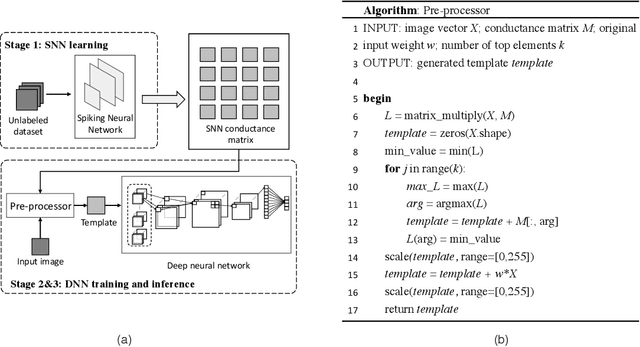
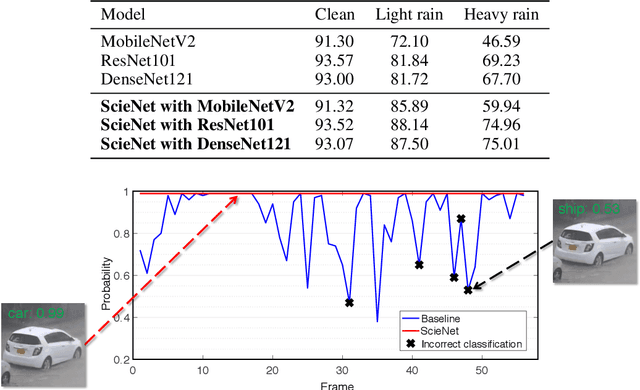
Deep neural networks (DNNs) provide high image classification accuracy, but experience significant performance degradation when perturbation from various sources are present in the input. The lack of resilience to input perturbations makes DNN less reliable for systems interacting with physical world such as autonomous vehicles, robotics, to name a few, where imperfect input is the normal condition. We present a hybrid deep network architecture with spike-assisted contextual information extraction (ScieNet). ScieNet integrates unsupervised learning using spiking neural network (SNN) for unsupervised contextual informationextraction with a back-end DNN trained for classification. The integrated network demonstrates high resilience to input perturbations without relying on prior training on perturbed inputs. We demonstrate ScieNet with different back-end DNNs for image classification using CIFAR dataset considering stochastic (noise) and structured (rain) input perturbations. Experimental results demonstrate significant improvement in accuracy on noisy and rainy images without prior training, while maintaining state-of-the-art accuracy on clean images.
HybridNet: Integrating Model-based and Data-driven Learning to Predict Evolution of Dynamical Systems
Jun 19, 2018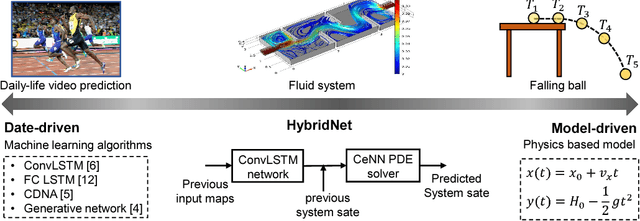

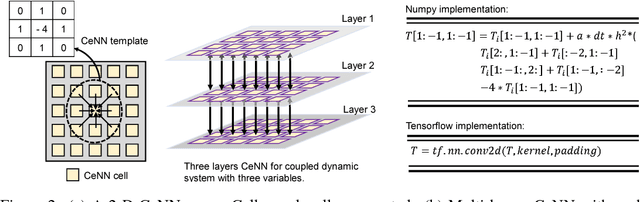
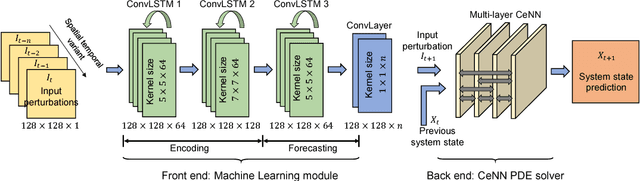
The robotic systems continuously interact with complex dynamical systems in the physical world. Reliable predictions of spatiotemporal evolution of these dynamical systems, with limited knowledge of system dynamics, are crucial for autonomous operation. In this paper, we present HybridNet, a framework that integrates data-driven deep learning and model-driven computation to reliably predict spatiotemporal evolution of a dynamical systems even with in-exact knowledge of their parameters. A data-driven deep neural network (DNN) with Convolutional LSTM (ConvLSTM) as the backbone is employed to predict the time-varying evolution of the external forces/perturbations. On the other hand, the model-driven computation is performed using Cellular Neural Network (CeNN), a neuro-inspired algorithm to model dynamical systems defined by coupled partial differential equations (PDEs). CeNN converts the intricate numerical computation into a series of convolution operations, enabling a trainable PDE solver. With a feedback control loop, HybridNet can learn the physical parameters governing the system's dynamics in real-time, and accordingly adapt the computation models to enhance prediction accuracy for time-evolving dynamical systems. The experimental results on two dynamical systems, namely, heat convection-diffusion system, and fluid dynamical system, demonstrate that the HybridNet produces higher accuracy than the state-of-the-art deep learning based approach.