 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybridNet: Integrating Model-based and Data-driven Learning to Predict Evolution of Dynamical Systems
Paper and Code
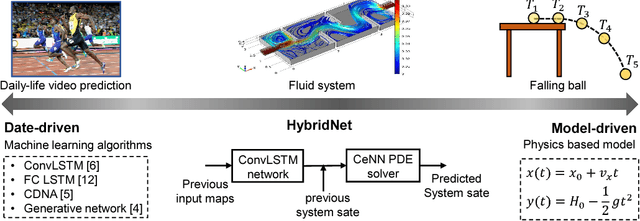

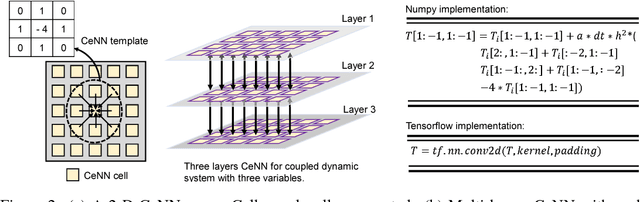
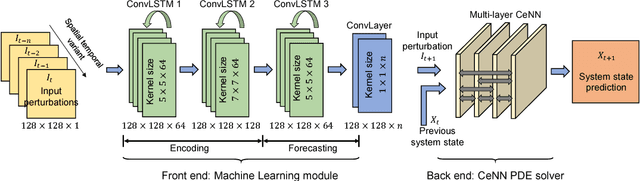
The robotic systems continuously interact with complex dynamical systems in the physical world. Reliable predictions of spatiotemporal evolution of these dynamical systems, with limited knowledge of system dynamics, are crucial for autonomous operation. In this paper, we present HybridNet, a framework that integrates data-driven deep learning and model-driven computation to reliably predict spatiotemporal evolution of a dynamical systems even with in-exact knowledge of their parameters. A data-driven deep neural network (DNN) with Convolutional LSTM (ConvLSTM) as the backbone is employed to predict the time-varying evolution of the external forces/perturbations. On the other hand, the model-driven computation is performed using Cellular Neural Network (CeNN), a neuro-inspired algorithm to model dynamical systems defined by coupled partial differential equations (PDEs). CeNN converts the intricate numerical computation into a series of convolution operations, enabling a trainable PDE solver. With a feedback control loop, HybridNet can learn the physical parameters governing the system's dynamics in real-time, and accordingly adapt the computation models to enhance prediction accuracy for time-evolving dynamical systems. The experimental results on two dynamical systems, namely, heat convection-diffusion system, and fluid dynamical system, demonstrate that the HybridNet produces higher accuracy than the state-of-the-art deep learning based approach.