 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient 3D Perception on Multi-Sweep Point Cloud with Gumbel Spatial Pruning
Nov 12, 2024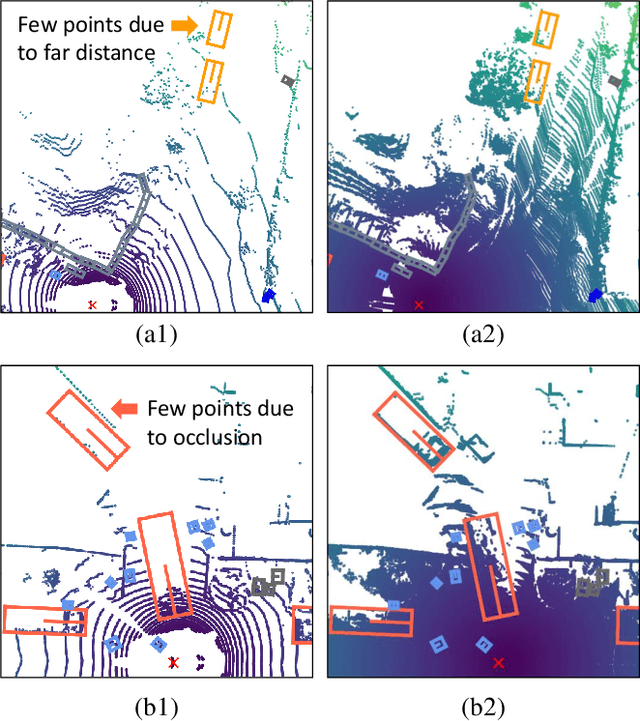
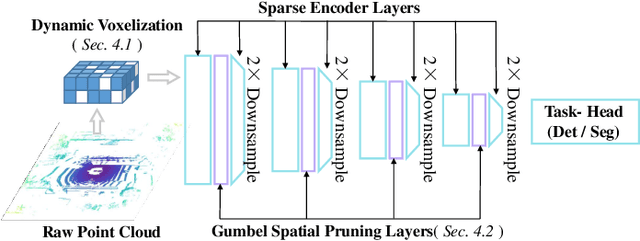
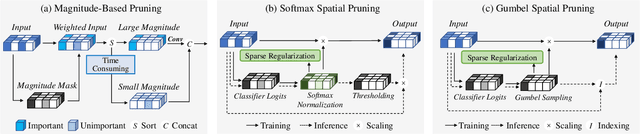
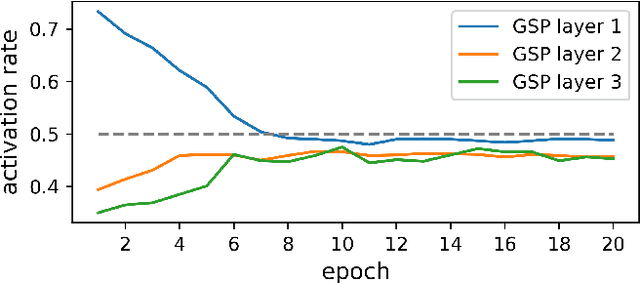
This paper studies point cloud perception within outdoor environments. Existing methods face limitations in recognizing objects located at a distance or occluded, due to the sparse nature of outdoor point clouds. In this work, we observe a significant mitigation of this problem by accumulating multiple temporally consecutive LiDAR sweeps, resulting in a remarkable improvement in perception accuracy. However, the computation cost also increases, hindering previous approaches from utilizing a large number of LiDAR sweeps. To tackle this challenge, we find that a considerable portion of points in the accumulated point cloud is redundant, and discarding these points has minimal impact on perception accuracy. We introduce a simple yet effective Gumbel Spatial Pruning (GSP) layer that dynamically prunes points based on a learned end-to-end sampling. The GSP layer is decoupled from other network components and thus can be seamlessly integrated into existing point cloud network architectures. Without incurring additional computational overhead, we increase the number of LiDAR sweeps from 10, a common practice, to as many as 40. Consequently, there is a significant enhancement in perception performance. For instance, in nuScenes 3D object detection and BEV map segmentation tasks, our pruning strategy improves the vanilla TransL baseline and other baseline methods.