 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBerkeley Humanoid: A Research Platform for Learning-based Control
Jul 31, 2024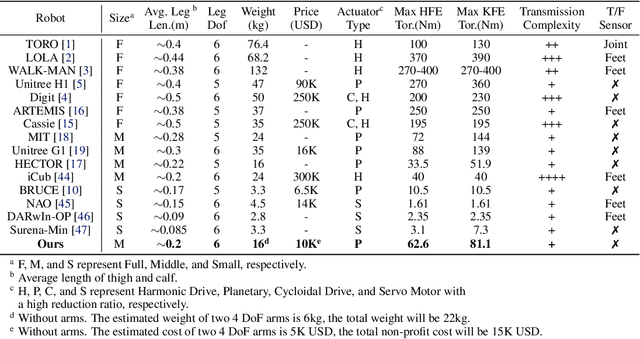
We introduce Berkeley Humanoid, a reliable and low-cost mid-scale humanoid research platform for learning-based control. Our lightweight, in-house-built robot is designed specifically for learning algorithms with low simulation complexity, anthropomorphic motion, and high reliability against falls. The robot's narrow sim-to-real gap enables agile and robust locomotion across various terrains in outdoor environments, achieved with a simple reinforcement learning controller using light domain randomization. Furthermore, we demonstrate the robot traversing for hundreds of meters, walking on a steep unpaved trail, and hopping with single and double legs as a testimony to its high performance in dynamical walking. Capable of omnidirectional locomotion and withstanding large perturbations with a compact setup, our system aims for scalable, sim-to-real deployment of learning-based humanoid systems. Please check http://berkeley-humanoid.com for more details.