 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Fourier Filtering Network with Contrastive Learning for UAV-based Unaligned Bi-modal Salient Object Detection
Nov 06, 2024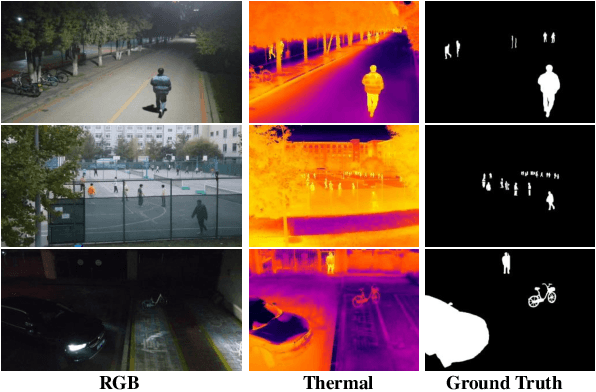
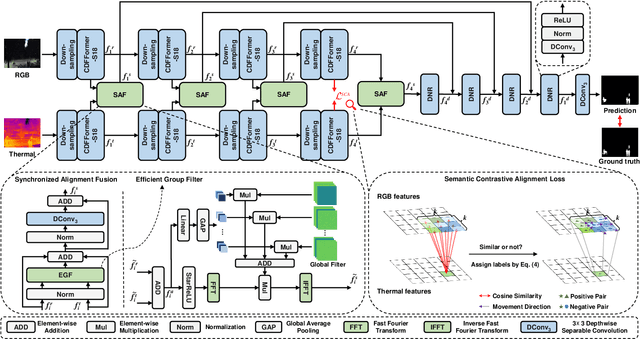
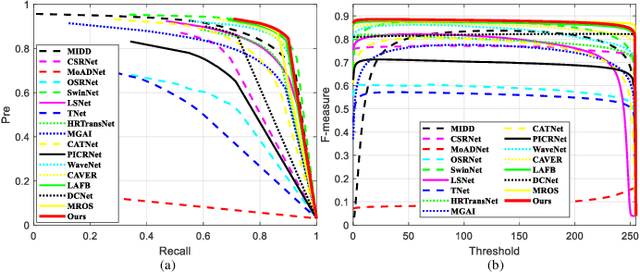
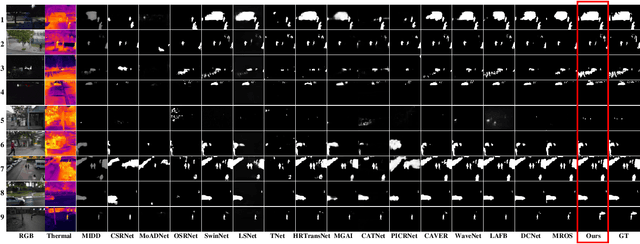
Unmanned aerial vehicle (UAV)-based bi-modal salient object detection (BSOD) aims to segment salient objects in a scene utilizing complementary cues in unaligned RGB and thermal image pairs. However, the high computational expense of existing UAV-based BSOD models limits their applicability to real-world UAV devices. To address this problem, we propose an efficient Fourier filter network with contrastive learning that achieves both real-time and accurate performance. Specifically, we first design a semantic contrastive alignment loss to align the two modalities at the semantic level, which facilitates mutual refinement in a parameter-free way. Second, inspired by the fast Fourier transform that obtains global relevance in linear complexity, we propose synchronized alignment fusion, which aligns and fuses bi-modal features in the channel and spatial dimensions by a hierarchical filtering mechanism. Our proposed model, AlignSal, reduces the number of parameters by 70.0%, decreases the floating point operations by 49.4%, and increases the inference speed by 152.5% compared to the cutting-edge BSOD model (i.e., MROS). Extensive experiments on the UAV RGB-T 2400 and three weakly aligned datasets demonstrate that AlignSal achieves both real-time inference speed and better performance and generalizability compared to sixteen state-of-the-art BSOD models across most evaluation metrics. In addition, our ablation studies further verify AlignSal's potential in boosting the performance of existing aligned BSOD models on UAV-based unaligned data. The code is available at: https://github.com/JoshuaLPF/AlignSal.