 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProphNet: Efficient Agent-Centric Motion Forecasting with Anchor-Informed Proposals
Mar 21, 2023Motion forecasting is a key module in an autonomous driving system. Due to the heterogeneous nature of multi-sourced input, multimodality in agent behavior, and low latency required by onboard deployment, this task is notoriously challenging. To cope with these difficulties, this paper proposes a novel agent-centric model with anchor-informed proposals for efficient multimodal motion prediction. We design a modality-agnostic strategy to concisely encode the complex input in a unified manner. We generate diverse proposals, fused with anchors bearing goal-oriented scene context, to induce multimodal prediction that covers a wide range of future trajectories. Our network architecture is highly uniform and succinct, leading to an efficient model amenable for real-world driving deployment. Experiments reveal that our agent-centric network compares favorably with the state-of-the-art methods in prediction accuracy, while achieving scene-centric level inference latency.
QML for Argoverse 2 Motion Forecasting Challenge
Jul 13, 2022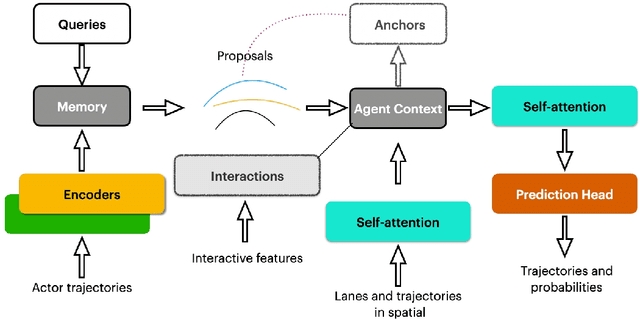

To safely navigate in various complex traffic scenarios, autonomous driving systems are generally equipped with a motion forecasting module to provide vital information for the downstream planning module. For the real-world onboard applications, both accuracy and latency of a motion forecasting model are essential. In this report, we present an effective and efficient solution, which ranks the 3rd place in the Argoverse 2 Motion Forecasting Challenge 2022.
A Group Norm Regularized LRR Factorization Model for Spectral Clustering
Jan 08, 2020
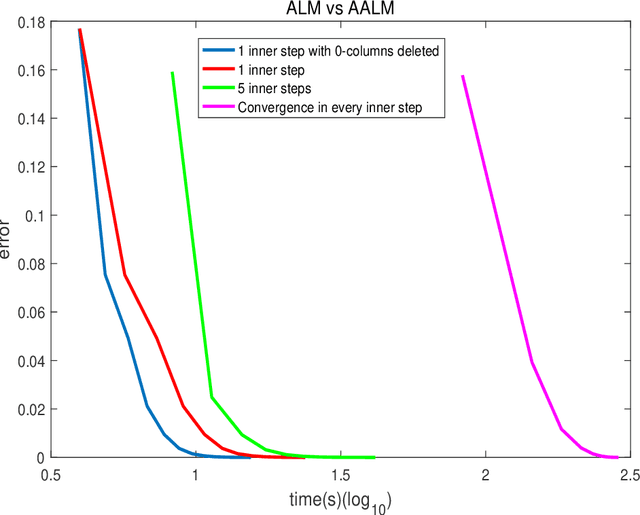


Spectral clustering is a very important and classic graph clustering method. Its clustering results are heavily dependent on affine matrix produced by data. Solving Low-Rank Representation~(LRR) problems is a very effective method to obtain affine matrix. This paper proposes LRR factorization model based on group norm regularization and uses Augmented Lagrangian Method~(ALM) algorithm to solve this model. We adopt group norm regularization to make the columns of the factor matrix sparse, thereby achieving the purpose of low rank. And no Singular Value Decomposition~(SVD) is required, computational complexity of each step is great reduced. We get the affine matrix by different LRR model and then perform cluster testing on synthetic noise data and real data~(Hopkin155 and EYaleB) respectively. Compared to traditional models and algorithms, ours are faster to solve affine matrix and more robust to noise. The final clustering results are better. And surprisingly, the numerical results show that our algorithm converges very fast, and the convergence condition is satisfied in only about ten steps. Group norm regularized LRR factorization model with the algorithm designed for it is effective and fast to obtain a better affine matrix.