 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbedding an Ethical Mind: Aligning Text-to-Image Synthesis via Lightweight Value Optimization
Oct 16, 2024



Recent advancements in diffusion models trained on large-scale data have enabled the generation of indistinguishable human-level images, yet they often produce harmful content misaligned with human values, e.g., social bias, and offensive content. Despite extensive research on Large Language Models (LLMs), the challenge of Text-to-Image (T2I) model alignment remains largely unexplored. Addressing this problem, we propose LiVO (Lightweight Value Optimization), a novel lightweight method for aligning T2I models with human values. LiVO only optimizes a plug-and-play value encoder to integrate a specified value principle with the input prompt, allowing the control of generated images over both semantics and values. Specifically, we design a diffusion model-tailored preference optimization loss, which theoretically approximates the Bradley-Terry model used in LLM alignment but provides a more flexible trade-off between image quality and value conformity. To optimize the value encoder, we also develop a framework to automatically construct a text-image preference dataset of 86k (prompt, aligned image, violating image, value principle) samples. Without updating most model parameters and through adaptive value selection from the input prompt, LiVO significantly reduces harmful outputs and achieves faster convergence, surpassing several strong baselines and taking an initial step towards ethically aligned T2I models.
Stop Line Aided Cooperative Positioning of Connected Vehicles
Dec 26, 2021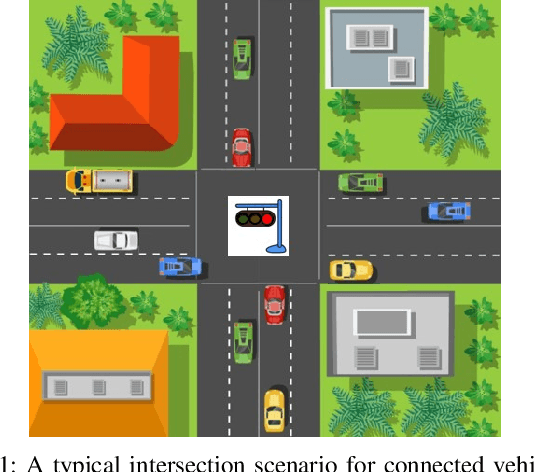
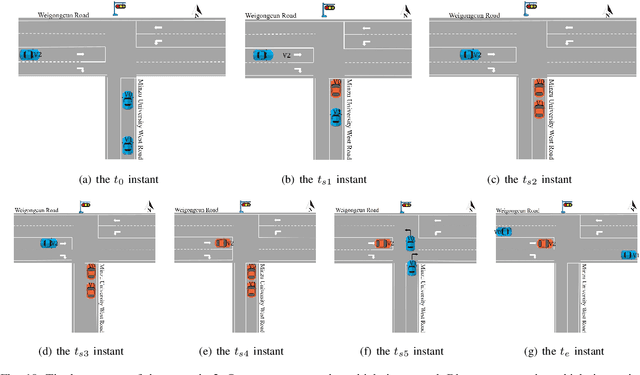
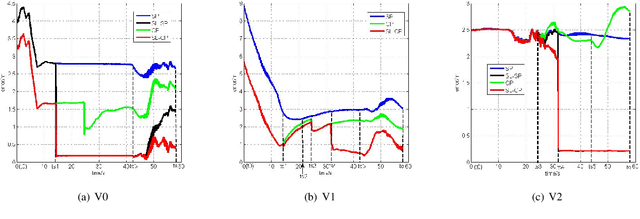
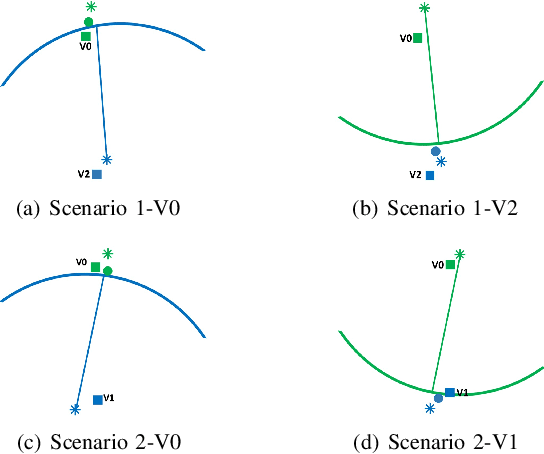
This paper develops a stop line aided cooperative positioning framework for connected vehicles, which creatively utilizes the location of the stop-line to achieve the positioning enhancement for a vehicular ad-hoc network (VANET) in intersection scenarios via Vehicle-to-Vehicle (V2V) communication. Firstly, a self-positioning correction scheme for the first stopped vehicle is presented, which applied the stop line information as benchmarks to correct the GNSS/INS positioning results. Then, the local observations of each vehicle are fused with the position estimates of other vehicles and the inter-vehicle distance measurements by using an extended Kalman filter (EKF). In this way, the benefits of the first stopped vehicle are extended to the whole VANET. Such a cooperative inertial navigation (CIN) framework can greatly improve the positioning performance of the VANET. Finally, experiments in Beijing show the effectiveness of the proposed stop line aided cooperative positioning framework.