 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Rotation-Invariant Recognition of Fine-grained Shapes from the Perspective of Contour Points
Mar 14, 2025



Rotation-invariant recognition of shapes is a common challenge in computer vision. Recent approaches have significantly improved the accuracy of rotation-invariant recognition by encoding the rotational invariance of shapes as hand-crafted image features and introducing deep neural networks. However, the methods based on pixels have too much redundant information, and the critical geometric information is prone to early leakage, resulting in weak rotation-invariant recognition of fine-grained shapes. In this paper, we reconsider the shape recognition problem from the perspective of contour points rather than pixels. We propose an anti-noise rotation-invariant convolution module based on contour geometric aware for fine-grained shape recognition. The module divides the shape contour into multiple local geometric regions(LGA), where we implement finer-grained rotation-invariant coding in terms of point topological relations. We provide a deep network composed of five such cascaded modules for classification and retrieval experiments. The results show that our method exhibits excellent performance in rotation-invariant recognition of fine-grained shapes. In addition, we demonstrate that our method is robust to contour noise and the rotation centers. The source code is available at https://github.com/zhenguonie/ANRICN_CGA.
Stop Line Aided Cooperative Positioning of Connected Vehicles
Dec 26, 2021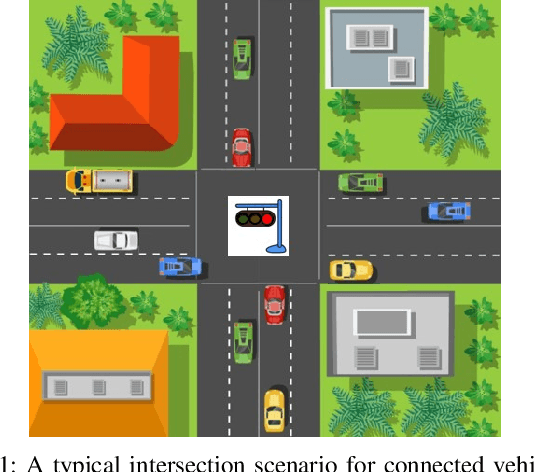
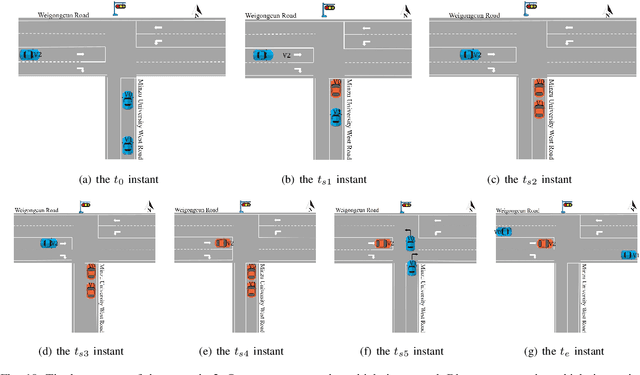
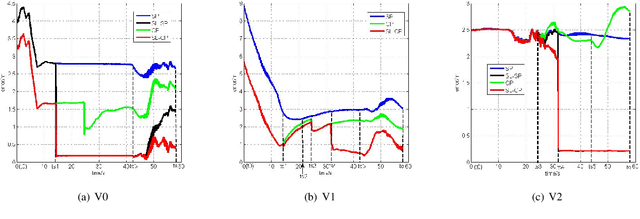
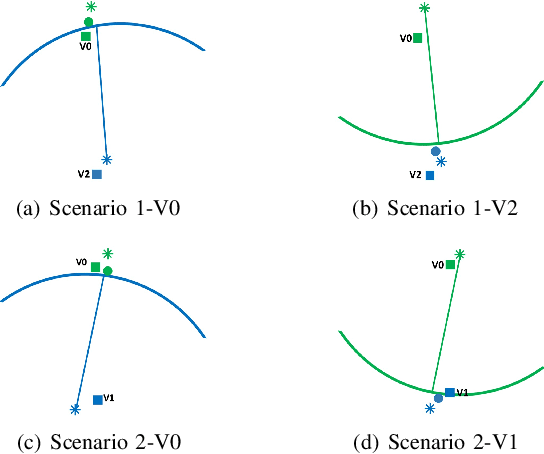
This paper develops a stop line aided cooperative positioning framework for connected vehicles, which creatively utilizes the location of the stop-line to achieve the positioning enhancement for a vehicular ad-hoc network (VANET) in intersection scenarios via Vehicle-to-Vehicle (V2V) communication. Firstly, a self-positioning correction scheme for the first stopped vehicle is presented, which applied the stop line information as benchmarks to correct the GNSS/INS positioning results. Then, the local observations of each vehicle are fused with the position estimates of other vehicles and the inter-vehicle distance measurements by using an extended Kalman filter (EKF). In this way, the benefits of the first stopped vehicle are extended to the whole VANET. Such a cooperative inertial navigation (CIN) framework can greatly improve the positioning performance of the VANET. Finally, experiments in Beijing show the effectiveness of the proposed stop line aided cooperative positioning framework.