 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantically Robust Unsupervised Image Translation for Paired Remote Sensing Images
Feb 17, 2025Image translation for change detection or classification in bi-temporal remote sensing images is unique. Although it can acquire paired images, it is still unsupervised. Moreover, strict semantic preservation in translation is always needed instead of multimodal outputs. In response to these problems, this paper proposes a new method, SRUIT (Semantically Robust Unsupervised Image-to-image Translation), which ensures semantically robust translation and produces deterministic output. Inspired by previous works, the method explores the underlying characteristics of bi-temporal Remote Sensing images and designs the corresponding networks. Firstly, we assume that bi-temporal Remote Sensing images share the same latent space, for they are always acquired from the same land location. So SRUIT makes the generators share their high-level layers, and this constraint will compel two domain mapping to fall into the same latent space. Secondly, considering land covers of bi-temporal images could evolve into each other, SRUIT exploits the cross-cycle-consistent adversarial networks to translate from one to the other and recover them. Experimental results show that constraints of sharing weights and cross-cycle consistency enable translated images with both good perceptual image quality and semantic preservation for significant differences.
Interactive Physically-Based Simulation of Roadheader Robot
Jun 29, 2022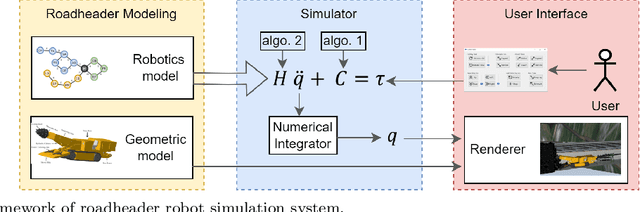
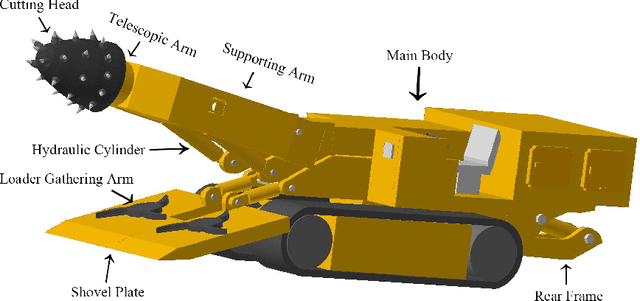
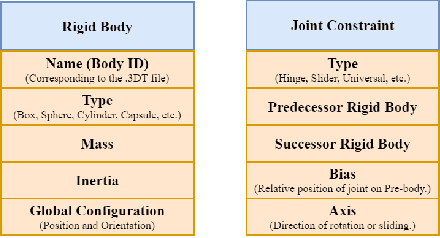
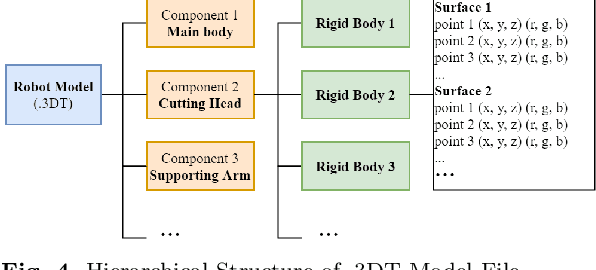
Roadheader is an engineering robot widely used in underground engineering and mining industry. Interactive dynamics simulation of roadheader is a fundamental problem in unmanned excavation and virtual reality training. However, current research is only based on traditional animation techniques or commercial game engines. There are few studies that apply real-time physical simulation of computer graphics to the field of roadheader robot. This paper aims to present an interactive physically-based simulation system of roadheader robot. To this end, an improved multibody simulation method based on generalized coordinates is proposed. First, our simulation method describes robot dynamics based on generalized coordinates. Compared to state-of-the-art methods, our method is more stable and accurate. Numerical simulation results showed that our method has significantly less error than the game engine in the same number of iterations. Second, we adopt the symplectic Euler integrator instead of the conventional fourth-order Runge-Kutta (RK4) method for dynamics iteration. Compared with other integrators, our method is more stable in energy drift during long-term simulation. The test results showed that our system achieved real-time interaction performance of 60 frames per second (fps). Furthermore, we propose a model format for geometric and robotics modeling of roadheaders to implement the system. Our interactive simulation system of roadheader meets the requirements of interactivity, accuracy and stability.