 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging Traffic State and Trajectory for Dynamic Road Network and Trajectory Representation Learning
Feb 08, 2025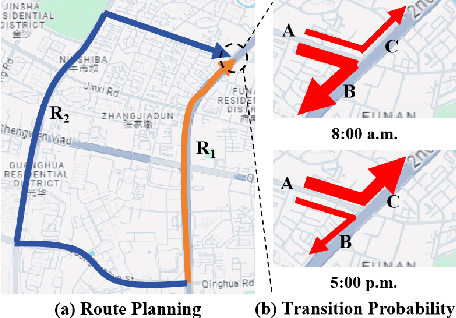
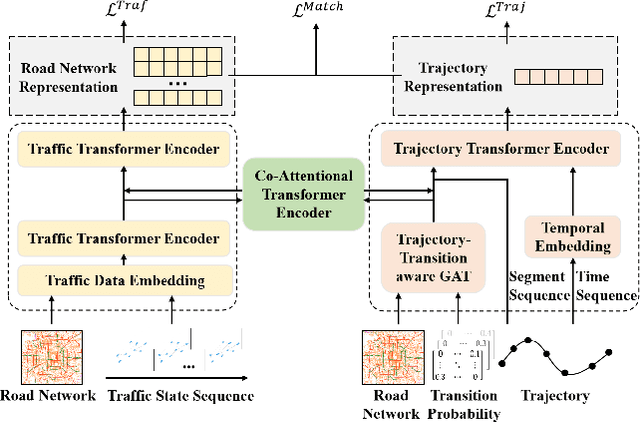
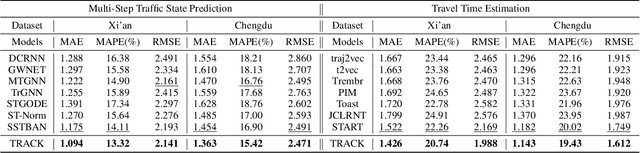
Effective urban traffic management is vital for sustainable city development, relying on intelligent systems with machine learning tasks such as traffic flow prediction and travel time estimation. Traditional approaches usually focus on static road network and trajectory representation learning, and overlook the dynamic nature of traffic states and trajectories, which is crucial for downstream tasks. To address this gap, we propose TRACK, a novel framework to bridge traffic state and trajectory data for dynamic road network and trajectory representation learning. TRACK leverages graph attention networks (GAT) to encode static and spatial road segment features, and introduces a transformer-based model for trajectory representation learning. By incorporating transition probabilities from trajectory data into GAT attention weights, TRACK captures dynamic spatial features of road segments. Meanwhile, TRACK designs a traffic transformer encoder to capture the spatial-temporal dynamics of road segments from traffic state data. To further enhance dynamic representations, TRACK proposes a co-attentional transformer encoder and a trajectory-traffic state matching task. Extensive experiments on real-life urban traffic datasets demonstrate the superiority of TRACK over state-of-the-art baselines. Case studies confirm TRACK's ability to capture spatial-temporal dynamics effectively.
BIGCity: A Universal Spatiotemporal Model for Unified Trajectory and Traffic State Data Analysis
Dec 01, 2024



Typical dynamic ST data includes trajectory data (representing individual-level mobility) and traffic state data (representing population-level mobility). Traditional studies often treat trajectory and traffic state data as distinct, independent modalities, each tailored to specific tasks within a single modality. However, real-world applications, such as navigation apps, require joint analysis of trajectory and traffic state data. Treating these data types as two separate domains can lead to suboptimal model performance. Although recent advances in ST data pre-training and ST foundation models aim to develop universal models for ST data analysis, most existing models are "multi-task, solo-data modality" (MTSM), meaning they can handle multiple tasks within either trajectory data or traffic state data, but not both simultaneously. To address this gap, this paper introduces BIGCity, the first multi-task, multi-data modality (MTMD) model for ST data analysis. The model targets two key challenges in designing an MTMD ST model: (1) unifying the representations of different ST data modalities, and (2) unifying heterogeneous ST analysis tasks. To overcome the first challenge, BIGCity introduces a novel ST-unit that represents both trajectories and traffic states in a unified format. Additionally, for the second challenge, BIGCity adopts a tunable large model with ST task-oriented prompt, enabling it to perform a range of heterogeneous tasks without the need for fine-tuning. Extensive experiments on real-world datasets demonstrate that BIGCity achieves state-of-the-art performance across 8 tasks, outperforming 18 baselines. To the best of our knowledge, BIGCity is the first model capable of handling both trajectories and traffic states for diverse heterogeneous tasks. Our code are available at https://github.com/bigscity/BIGCity