 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring High-quality Target Domain Information for Unsupervised Domain Adaptive Semantic Segmentation
Aug 12, 2022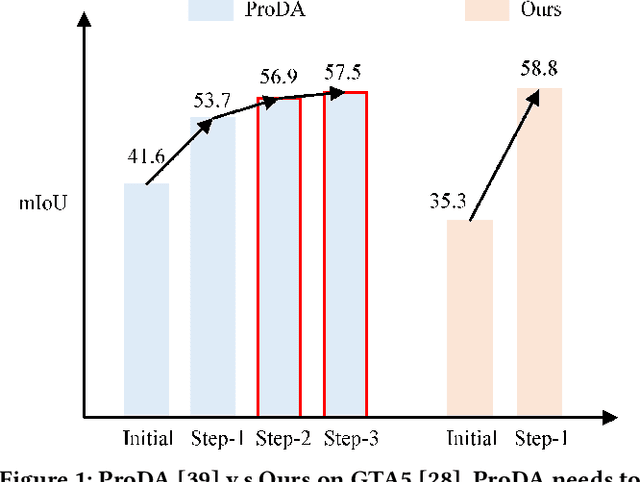



In unsupervised domain adaptive (UDA) semantic segmentation, the distillation based methods are currently dominant in performance. However, the distillation technique requires complicate multi-stage process and many training tricks. In this paper, we propose a simple yet effective method that can achieve competitive performance to the advanced distillation methods. Our core idea is to fully explore the target-domain information from the views of boundaries and features. First, we propose a novel mix-up strategy to generate high-quality target-domain boundaries with ground-truth labels. Different from the source-domain boundaries in previous works, we select the high-confidence target-domain areas and then paste them to the source-domain images. Such a strategy can generate the object boundaries in target domain (edge of target-domain object areas) with the correct labels. Consequently, the boundary information of target domain can be effectively captured by learning on the mixed-up samples. Second, we design a multi-level contrastive loss to improve the representation of target-domain data, including pixel-level and prototype-level contrastive learning. By combining two proposed methods, more discriminative features can be extracted and hard object boundaries can be better addressed for the target domain. The experimental results on two commonly adopted benchmarks (\textit{i.e.}, GTA5 $\rightarrow$ Cityscapes and SYNTHIA $\rightarrow$ Cityscapes) show that our method achieves competitive performance to complicated distillation methods. Notably, for the SYNTHIA$\rightarrow$ Cityscapes scenario, our method achieves the state-of-the-art performance with $57.8\%$ mIoU and $64.6\%$ mIoU on 16 classes and 13 classes. Code is available at https://github.com/ljjcoder/EHTDI.
Distributed sampled-data control of nonholonomic multi-robot systems with proximity networks
Sep 07, 2016
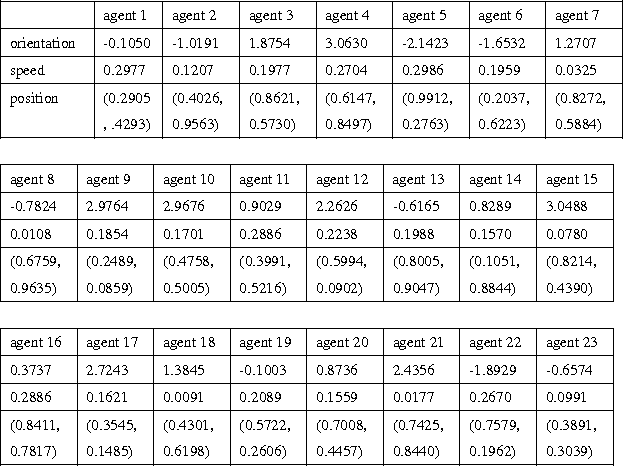
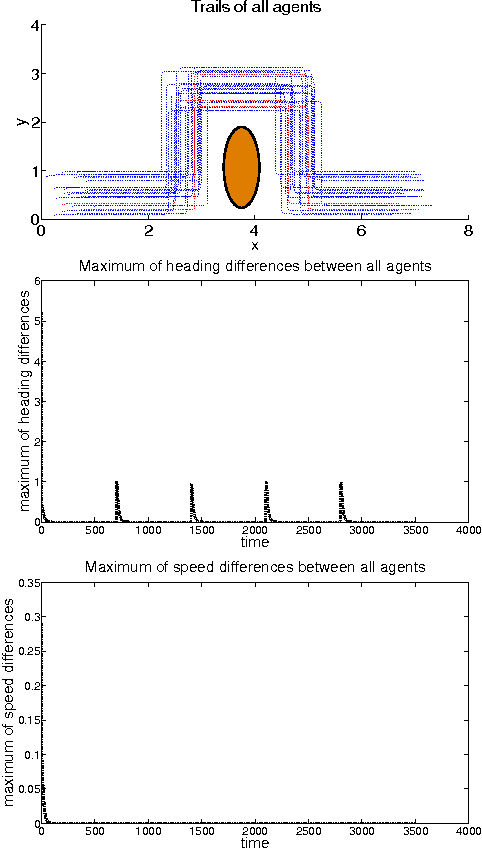
This paper considers the distributed sampled-data control problem of a group of mobile robots connected via distance-induced proximity networks. A dwell time is assumed in order to avoid chattering in the neighbor relations that may be caused by abrupt changes of positions when updating information from neighbors. Distributed sampled-data control laws are designed based on nearest neighbour rules, which in conjunction with continuous-time dynamics results in hybrid closed-loop systems. For uniformly and independently initial states, a sufficient condition is provided to guarantee synchronization for the system without leaders. In order to steer all robots to move with the desired orientation and speed, we then introduce a number of leaders into the system, and quantitatively establish the proportion of leaders needed to track either constant or time-varying signals. All these conditions depend only on the neighborhood radius, the maximum initial moving speed and the dwell time, without assuming a prior properties of the neighbor graphs as are used in most of the existing literature.
* 15 pages, 3 figures