 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Aware 3D Scene Generation with Spatially-constrained Diffusion Models
Jun 26, 2024Generating 3D scenes from human motion sequences supports numerous applications, including virtual reality and architectural design. However, previous auto-regression-based human-aware 3D scene generation methods have struggled to accurately capture the joint distribution of multiple objects and input humans, often resulting in overlapping object generation in the same space. To address this limitation, we explore the potential of diffusion models that simultaneously consider all input humans and the floor plan to generate plausible 3D scenes. Our approach not only satisfies all input human interactions but also adheres to spatial constraints with the floor plan. Furthermore, we introduce two spatial collision guidance mechanisms: human-object collision avoidance and object-room boundary constraints. These mechanisms help avoid generating scenes that conflict with human motions while respecting layout constraints. To enhance the diversity and accuracy of human-guided scene generation, we have developed an automated pipeline that improves the variety and plausibility of human-object interactions in the existing 3D FRONT HUMAN dataset. Extensive experiments on both synthetic and real-world datasets demonstrate that our framework can generate more natural and plausible 3D scenes with precise human-scene interactions, while significantly reducing human-object collisions compared to previous state-of-the-art methods. Our code and data will be made publicly available upon publication of this work.
Be Careful with Rotation: A Uniform Backdoor Pattern for 3D Shape
Dec 01, 2022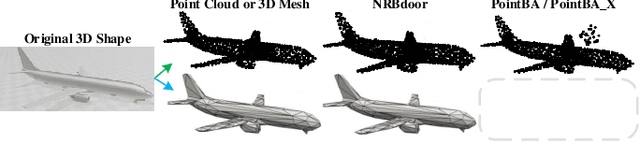
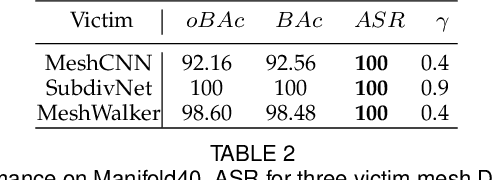
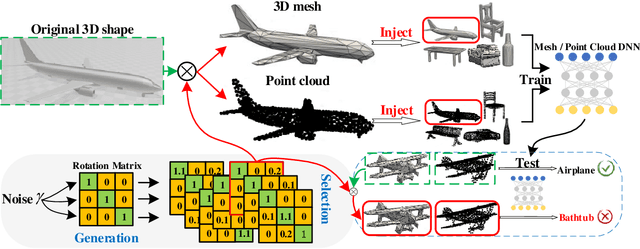
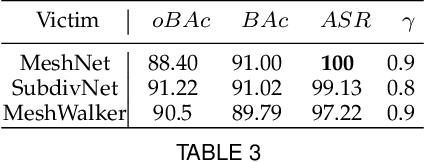
For saving cost, many deep neural networks (DNNs) are trained on third-party datasets downloaded from internet, which enables attacker to implant backdoor into DNNs. In 2D domain, inherent structures of different image formats are similar. Hence, backdoor attack designed for one image format will suite for others. However, when it comes to 3D world, there is a huge disparity among different 3D data structures. As a result, backdoor pattern designed for one certain 3D data structure will be disable for other data structures of the same 3D scene. Therefore, this paper designs a uniform backdoor pattern: NRBdoor (Noisy Rotation Backdoor) which is able to adapt for heterogeneous 3D data structures. Specifically, we start from the unit rotation and then search for the optimal pattern by noise generation and selection process. The proposed NRBdoor is natural and imperceptible, since rotation is a common operation which usually contains noise due to both the miss match between a pair of points and the sensor calibration error for real-world 3D scene. Extensive experiments on 3D mesh and point cloud show that the proposed NRBdoor achieves state-of-the-art performance, with negligible shape variation.