 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRearranging the Environment to Maximize Energy with a Robotic Circuit Drawing
Nov 15, 2021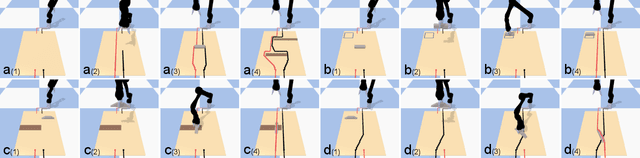
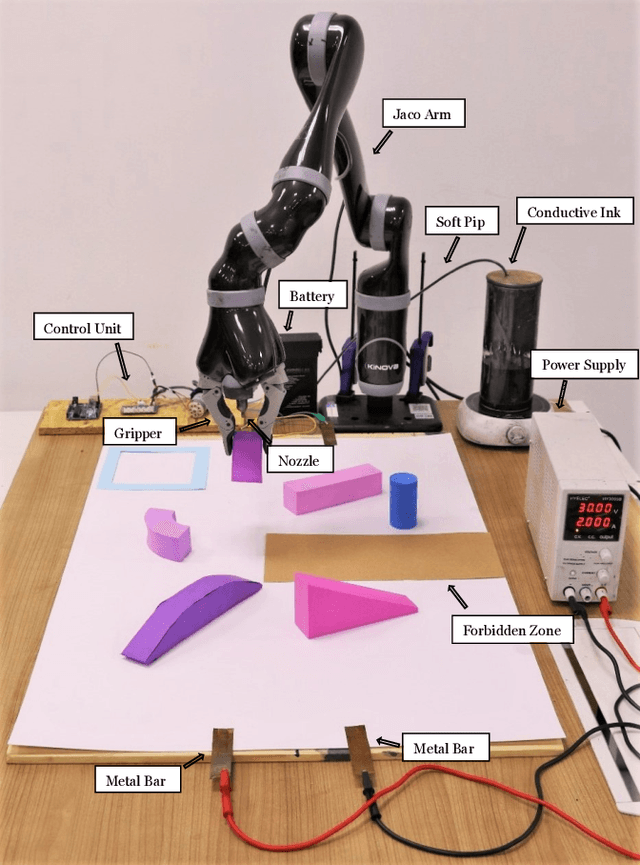
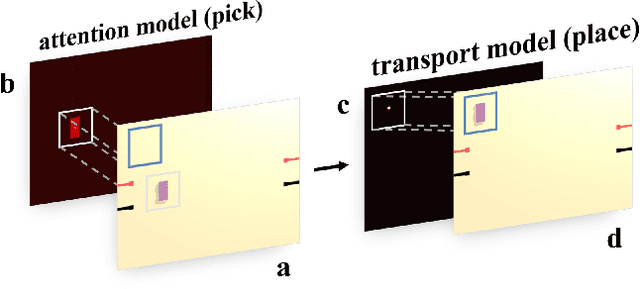
Robots with the ability to actively acquire power from surroundings will be greatly beneficial for long-term autonomy and to survive in uncertain environments. In this work, we present a robot capable of drawing circuits with conductive ink while also rearranging the visual world to receive maximum energy from a power source. A range of circuit drawing tasks is designed to simulate real-world scenarios, including avoiding physical obstacles and regions that would discontinue drawn circuits. We adopt the state-of-the-art Transporter networks for pick-and-place manipulation from visual observation. We conduct experiments in both simulation and real-world settings, and our results show that, with a small number of demonstrations, the robot learns to rearrange the placement of objects (removing obstacles and bridging areas unsuitable for drawing) and to connect a power source with a minimum amount of conductive ink. As autonomous robots become more present, in our houses and other planets, our proposed method brings a novel way for machines to keep themselves functional by rearranging their surroundings to create their own electric circuits.
CircuitBot: Learning to Survive with Robotic Circuit Drawing
Nov 10, 2020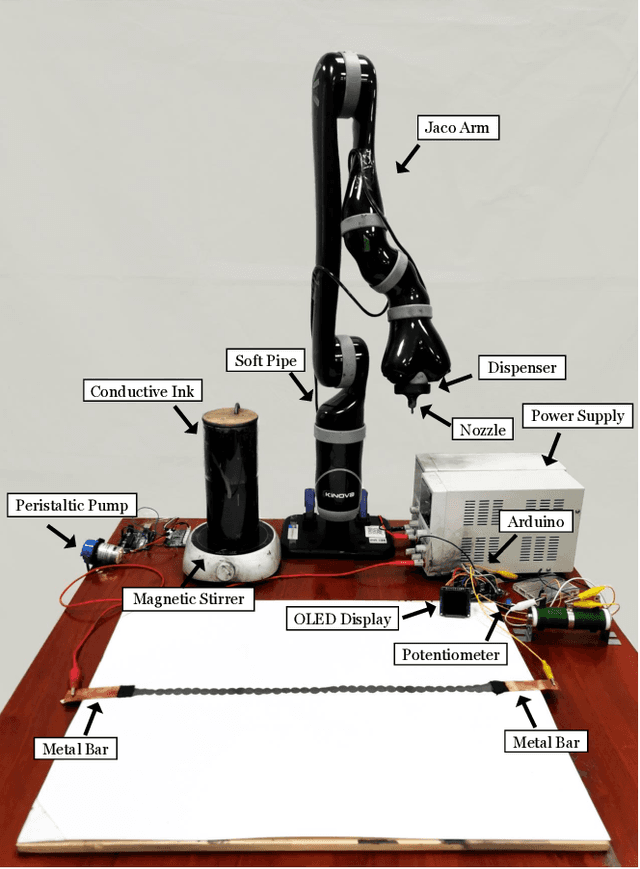

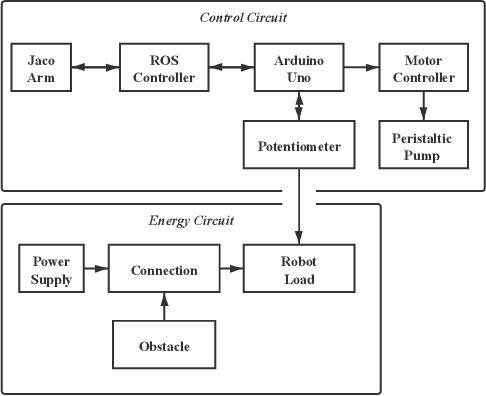
Robots with the ability to actively acquire power from surroundings will be greatly beneficial for long-term autonomy, and to survive in dynamic, uncertain environments. In this work, a scenario is presented where a robot has limited energy, and the only way to survive is to access the energy from a power source. With no cables or wires available, the robot learns to construct an electrical path and avoid potential obstacles during the connection. We present this robot, capable of drawing connected circuit patterns with graphene-based conductive ink. A state-of-the-art Mix-Variable Bayesian Optimization is adopted to optimize the placement of conductive shapes to maximize the power this robot receives. Our results show that, within a small number of trials, the robot learns to build parallel circuits to maximize the voltage received and avoid obstacles which steal energy from the robot.