 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRearranging the Environment to Maximize Energy with a Robotic Circuit Drawing
Paper and Code
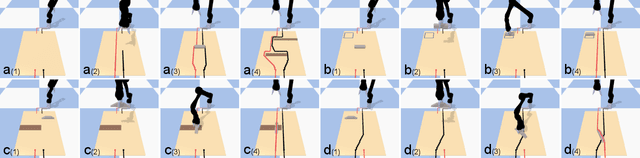
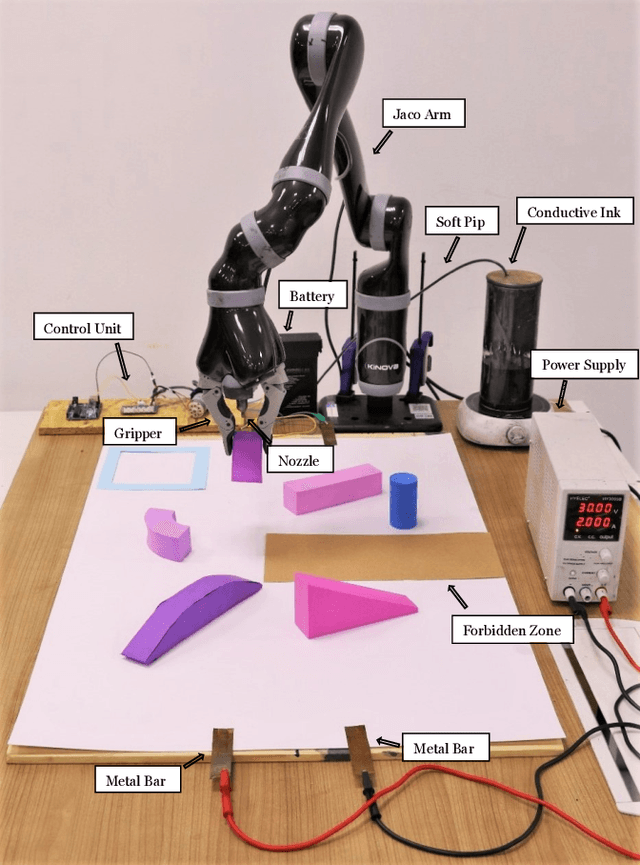
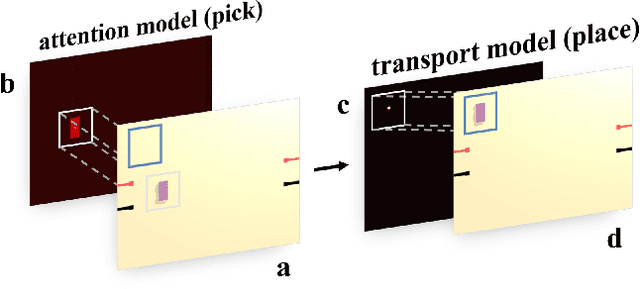
Robots with the ability to actively acquire power from surroundings will be greatly beneficial for long-term autonomy and to survive in uncertain environments. In this work, we present a robot capable of drawing circuits with conductive ink while also rearranging the visual world to receive maximum energy from a power source. A range of circuit drawing tasks is designed to simulate real-world scenarios, including avoiding physical obstacles and regions that would discontinue drawn circuits. We adopt the state-of-the-art Transporter networks for pick-and-place manipulation from visual observation. We conduct experiments in both simulation and real-world settings, and our results show that, with a small number of demonstrations, the robot learns to rearrange the placement of objects (removing obstacles and bridging areas unsuitable for drawing) and to connect a power source with a minimum amount of conductive ink. As autonomous robots become more present, in our houses and other planets, our proposed method brings a novel way for machines to keep themselves functional by rearranging their surroundings to create their own electric circuits.