 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Robot Navigation with Rich Information Mapping in Nuclear Storage Environments
Apr 11, 2019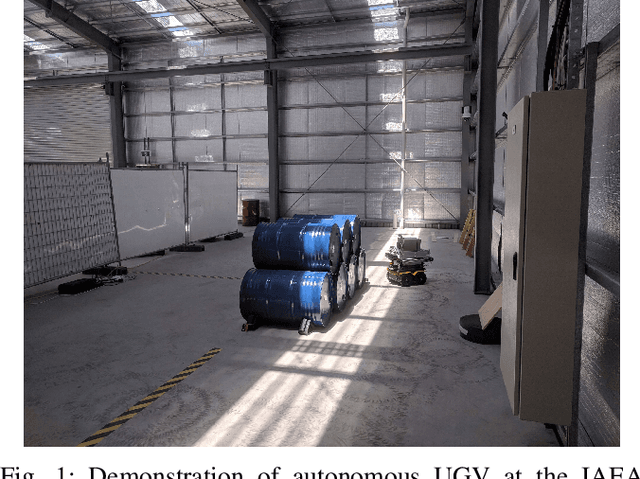
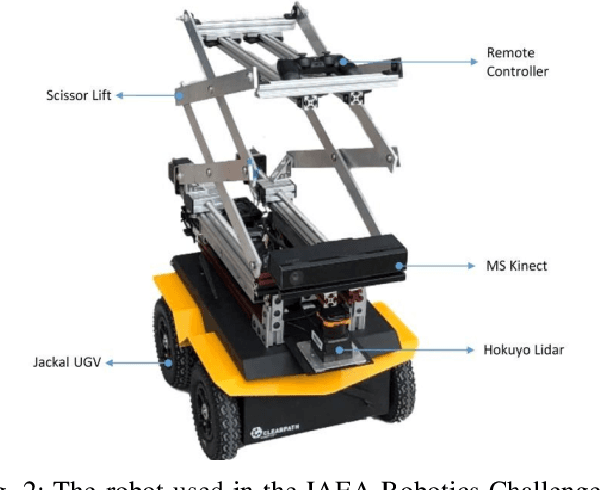
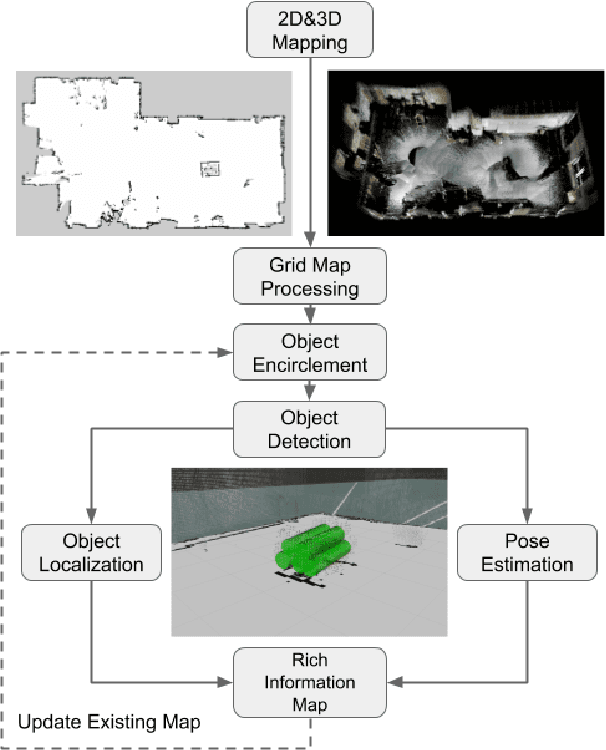
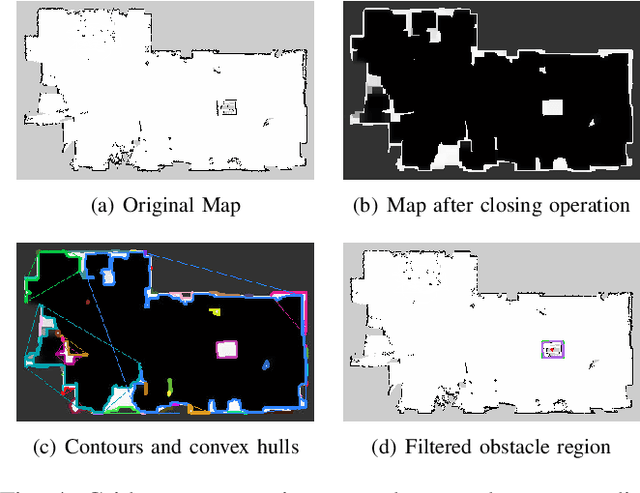
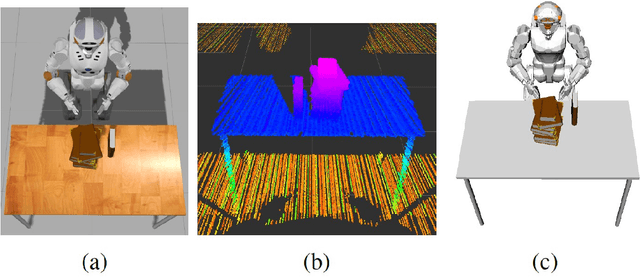
This paper presents our approach to develop a method for an unmanned ground vehicle (UGV) to perform inspection tasks in nuclear environments using rich information maps. To reduce inspectors' exposure to elevated radiation levels, an autonomous navigation framework for the UGV has been developed to perform routine inspections such as counting containers, recording their ID tags and performing gamma measurements on some of them. In order to achieve autonomy, a rich information map is generated which includes not only the 2D global cost map consisting of obstacle locations for path planning, but also the location and orientation information for the objects of interest from the inspector's perspective. The UGV's autonomy framework utilizes this information to prioritize locations to navigate to perform the inspections. In this paper, we present our method of generating this rich information map, originally developed to meet the requirements of the International Atomic Energy Agency (IAEA) Robotics Challenge. We demonstrate the performance of our method in a simulated testbed environment containing uranium hexafluoride (UF6) storage container mock ups.
Integrating Risk in Humanoid Robot Control for Applications in the Nuclear Industry
Jul 12, 2018
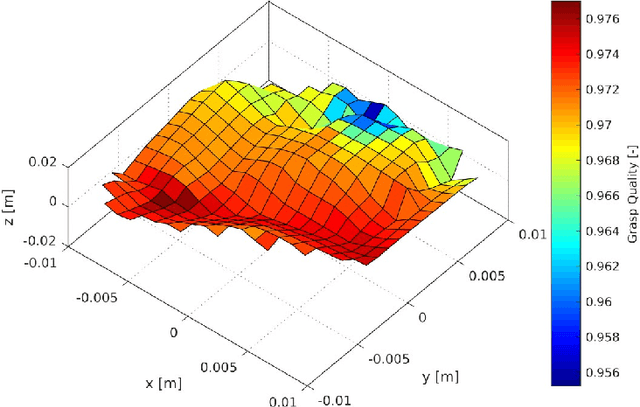
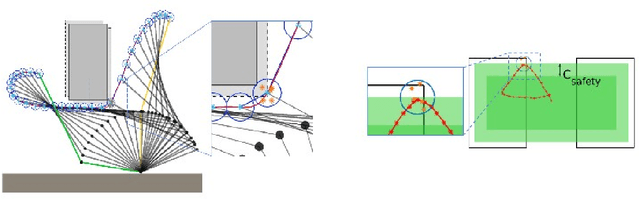
This paper discuss the integration of risk into a robot control framework for decommissioning applications in the nuclear industry. Our overall objective is to allow the robot to evaluate a risk associated with several methods of completing the same task by combining a set of action sequences. If the environment is known and in the absence of sensing errors each set of actions would successfully complete the task. In this paper, instead of attempting to model the errors associated with each sensing system in order to compute an exact solution, a set of solutions are obtained along with a prescribed risk index. The risk associated with each set of actions can then be compared to possible payoffs or rewards, for instance task completion time or power consumption. This information is then sent to a high level decision planner, for instance a human teleoperator, who can then make a more informed decision regarding the robots actions. In order to illustrate the concept, we introduce three specific risk measures, namely, the collision risk and the risk of toppling and failure risk associated with grasping an object. We demonstrate the results from this foundational study of risk-aware compositional robot autonomy in simulation using NASA's Valkyrie humanoid robot, and the grasping simulator HAPTIX.
* 9 pages, 6 figues