 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact-Implicit Planning and Control for Non-Prehensile Manipulation Using State-Triggered Constraints
Oct 18, 2022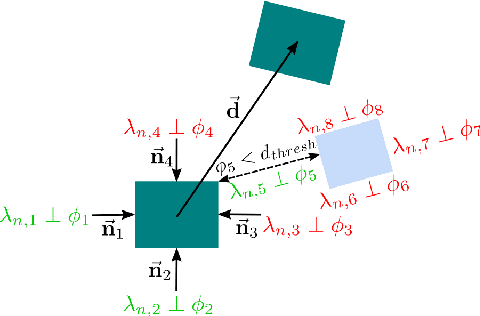
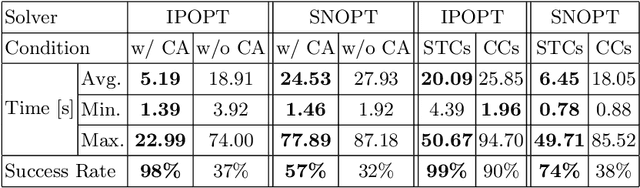
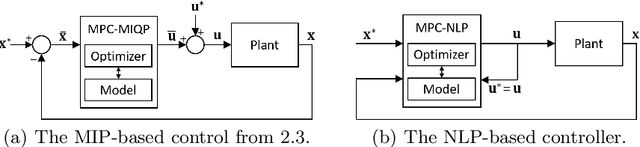
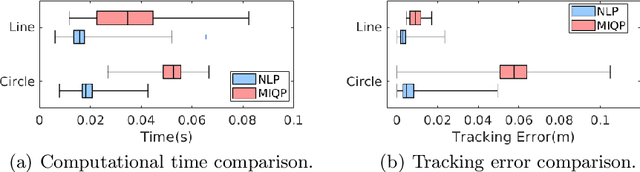
We present a contact-implicit planning approach that can generate contact-interaction trajectories for non-prehensile manipulation problems without tuning or a tailored initial guess and with high success rates. This is achieved by leveraging the concept of state-triggered constraints (STCs) to capture the hybrid dynamics induced by discrete contact modes without explicitly reasoning about the combinatorics. STCs enable triggering arbitrary constraints by a strict inequality condition in a continuous way. We first use STCs to develop an automatic contact constraint activation method to minimize the effective constraint space based on the utility of contact candidates for a given task. Then, we introduce a re-formulation of the Coulomb friction model based on STCs that is more efficient for the discovery of tangential forces than the well-studied complementarity constraints-based approach. Last, we include the proposed friction model in the planning and control of quasi-static planar pushing. The performance of the STC-based contact activation and friction methods is evaluated by extensive simulation experiments in a dynamic pushing scenario. The results demonstrate that our methods outperform the baselines based on complementarity constraints with a significant decrease in the planning time and a higher success rate. We then compare the proposed quasi-static pushing controller against a mixed-integer programming-based approach in simulation and find that our method is computationally more efficient and provides a better tracking accuracy, with the added benefit of not requiring an initial control trajectory. Finally, we present hardware experiments demonstrating the usability of our framework in executing complex trajectories in real-time even with a low-accuracy tracking system.
Affordance-Based Mobile Robot Navigation Among Movable Obstacles
Feb 09, 2021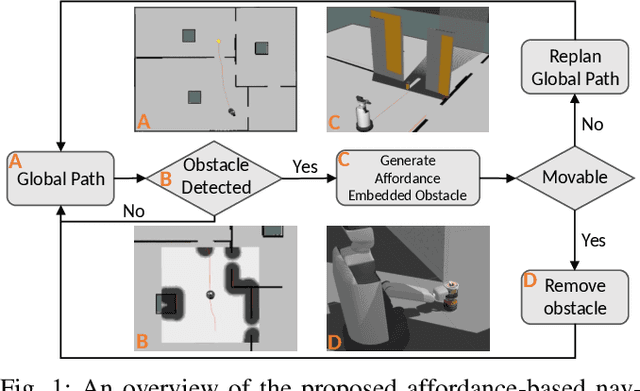
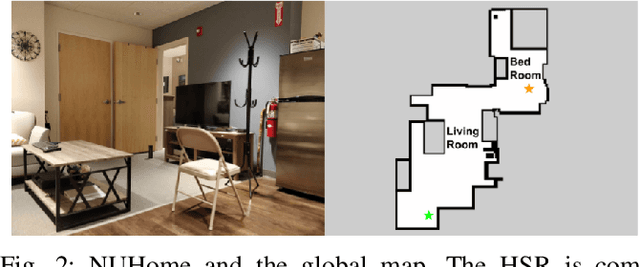
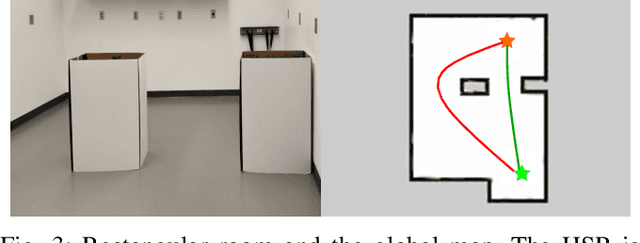
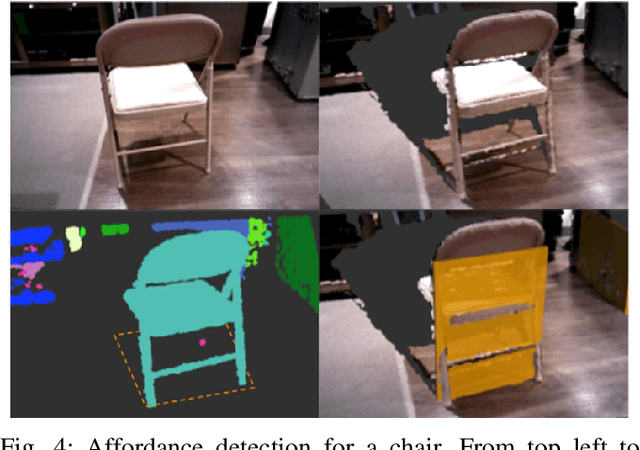
Avoiding obstacles in the perceived world has been the classical approach to autonomous mobile robot navigation. However, this usually leads to unnatural and inefficient motions that significantly differ from the way humans move in tight and dynamic spaces, as we do not refrain interacting with the environment around us when necessary. Inspired by this observation, we propose a framework for autonomous robot navigation among movable obstacles (NAMO) that is based on the theory of affordances and contact-implicit motion planning. We consider a realistic scenario in which a mobile service robot negotiates unknown obstacles in the environment while navigating to a goal state. An affordance extraction procedure is performed for novel obstacles to detect their movability, and a contact-implicit trajectory optimization method is used to enable the robot to interact with movable obstacles to improve the task performance or to complete an otherwise infeasible task. We demonstrate the performance of the proposed framework by hardware experiments with Toyota's Human Support Robot.
Autonomous Robot Navigation with Rich Information Mapping in Nuclear Storage Environments
Apr 11, 2019
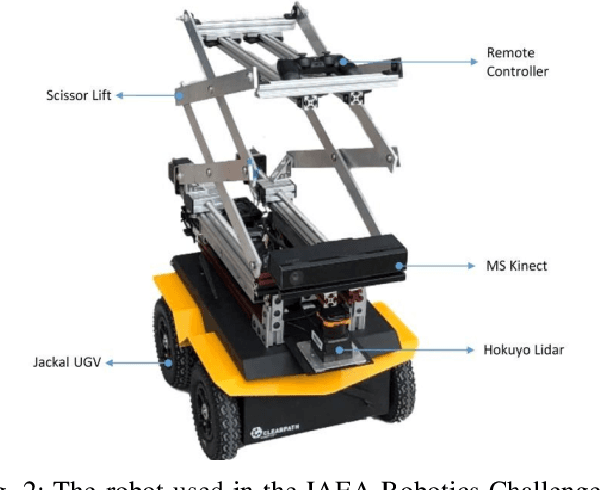
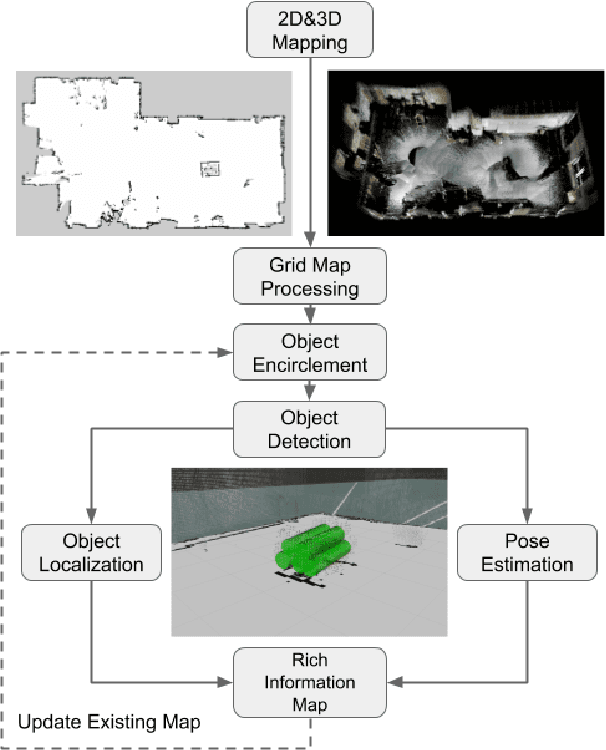
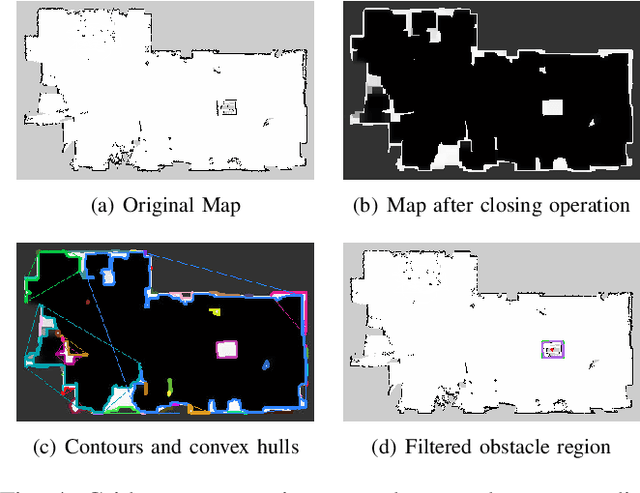
This paper presents our approach to develop a method for an unmanned ground vehicle (UGV) to perform inspection tasks in nuclear environments using rich information maps. To reduce inspectors' exposure to elevated radiation levels, an autonomous navigation framework for the UGV has been developed to perform routine inspections such as counting containers, recording their ID tags and performing gamma measurements on some of them. In order to achieve autonomy, a rich information map is generated which includes not only the 2D global cost map consisting of obstacle locations for path planning, but also the location and orientation information for the objects of interest from the inspector's perspective. The UGV's autonomy framework utilizes this information to prioritize locations to navigate to perform the inspections. In this paper, we present our method of generating this rich information map, originally developed to meet the requirements of the International Atomic Energy Agency (IAEA) Robotics Challenge. We demonstrate the performance of our method in a simulated testbed environment containing uranium hexafluoride (UF6) storage container mock ups.