 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact-Implicit Planning and Control for Non-Prehensile Manipulation Using State-Triggered Constraints
Paper and Code
Oct 18, 2022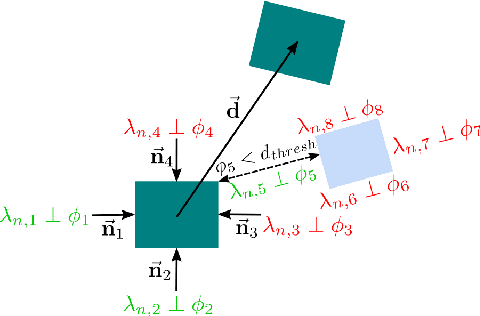
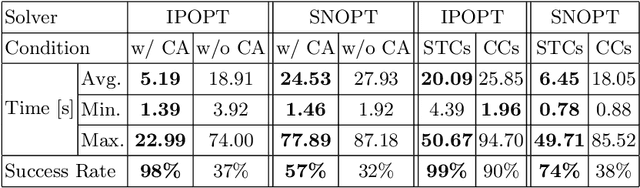
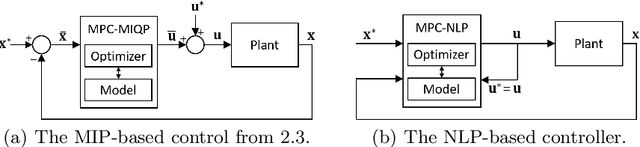
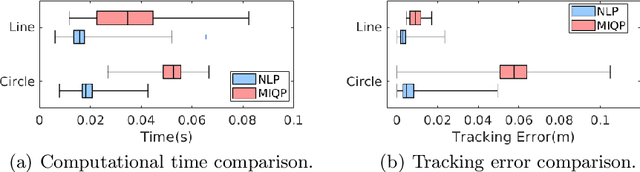
We present a contact-implicit planning approach that can generate contact-interaction trajectories for non-prehensile manipulation problems without tuning or a tailored initial guess and with high success rates. This is achieved by leveraging the concept of state-triggered constraints (STCs) to capture the hybrid dynamics induced by discrete contact modes without explicitly reasoning about the combinatorics. STCs enable triggering arbitrary constraints by a strict inequality condition in a continuous way. We first use STCs to develop an automatic contact constraint activation method to minimize the effective constraint space based on the utility of contact candidates for a given task. Then, we introduce a re-formulation of the Coulomb friction model based on STCs that is more efficient for the discovery of tangential forces than the well-studied complementarity constraints-based approach. Last, we include the proposed friction model in the planning and control of quasi-static planar pushing. The performance of the STC-based contact activation and friction methods is evaluated by extensive simulation experiments in a dynamic pushing scenario. The results demonstrate that our methods outperform the baselines based on complementarity constraints with a significant decrease in the planning time and a higher success rate. We then compare the proposed quasi-static pushing controller against a mixed-integer programming-based approach in simulation and find that our method is computationally more efficient and provides a better tracking accuracy, with the added benefit of not requiring an initial control trajectory. Finally, we present hardware experiments demonstrating the usability of our framework in executing complex trajectories in real-time even with a low-accuracy tracking system.