 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Risk in Humanoid Robot Control for Applications in the Nuclear Industry
Paper and Code
Jul 12, 2018
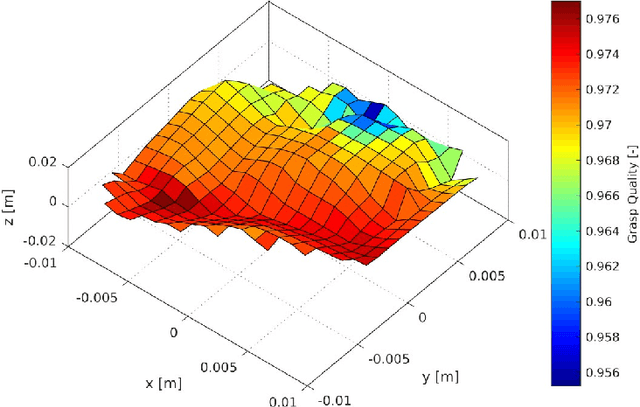
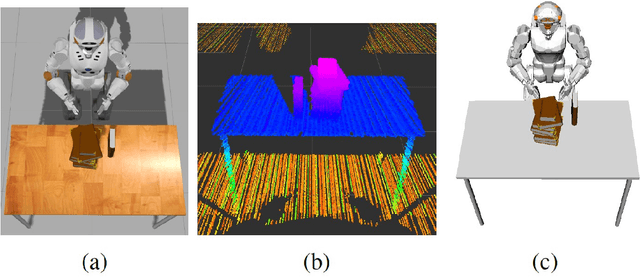
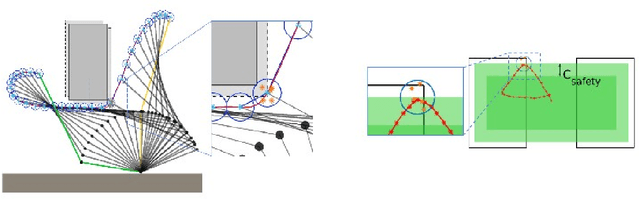
This paper discuss the integration of risk into a robot control framework for decommissioning applications in the nuclear industry. Our overall objective is to allow the robot to evaluate a risk associated with several methods of completing the same task by combining a set of action sequences. If the environment is known and in the absence of sensing errors each set of actions would successfully complete the task. In this paper, instead of attempting to model the errors associated with each sensing system in order to compute an exact solution, a set of solutions are obtained along with a prescribed risk index. The risk associated with each set of actions can then be compared to possible payoffs or rewards, for instance task completion time or power consumption. This information is then sent to a high level decision planner, for instance a human teleoperator, who can then make a more informed decision regarding the robots actions. In order to illustrate the concept, we introduce three specific risk measures, namely, the collision risk and the risk of toppling and failure risk associated with grasping an object. We demonstrate the results from this foundational study of risk-aware compositional robot autonomy in simulation using NASA's Valkyrie humanoid robot, and the grasping simulator HAPTIX.