 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Hypothesis Visual-Inertial Flow
Mar 08, 2018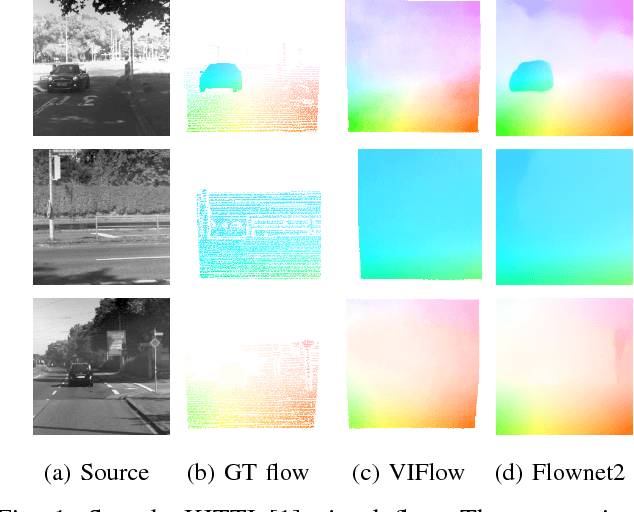
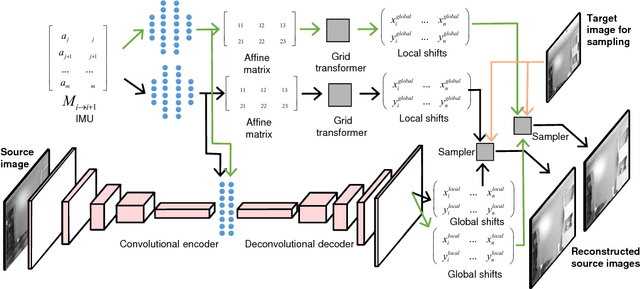
Estimating the correspondences between pixels in sequences of images is a critical first step for a myriad of tasks including vision-aided navigation (e.g., visual odometry (VO), visual-inertial odometry (VIO), and visual simultaneous localization and mapping (VSLAM)) and anomaly detection. We introduce a new unsupervised deep neural network architecture called the Visual Inertial Flow (VIFlow) network and demonstrate image correspondence and optical flow estimation by an unsupervised multi-hypothesis deep neural network receiving grayscale imagery and extra-visual inertial measurements. VIFlow learns to combine heterogeneous sensor streams and sample from an unknown, un-parametrized noise distribution to generate several (4 or 8 in this work) probable hypotheses on the pixel-level correspondence mappings between a source image and a target image . We quantitatively benchmark VIFlow against several leading vision-only dense correspondence and flow methods and show a substantial decrease in runtime and increase in efficiency compared to all methods with similar performance to state-of-the-art (SOA) dense correspondence matching approaches. We also present qualitative results showing how VIFlow can be used for detecting anomalous independent motion.
Vision-Aided Absolute Trajectory Estimation Using an Unsupervised Deep Network with Online Error Correction
Mar 08, 2018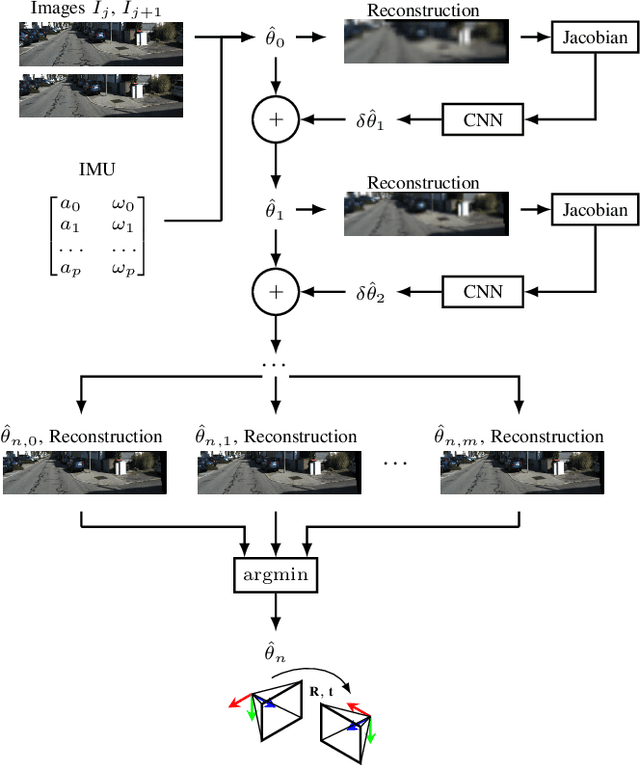
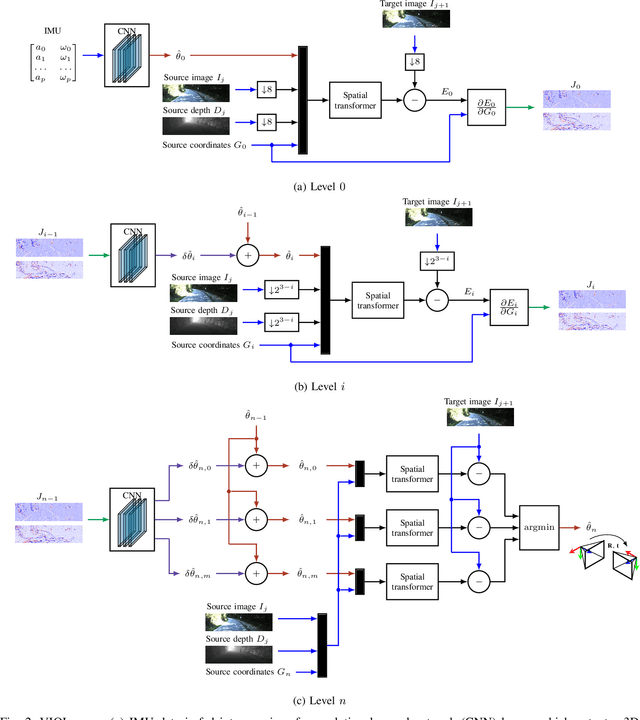
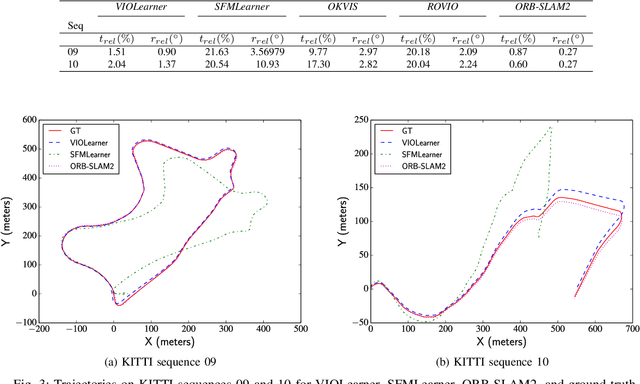
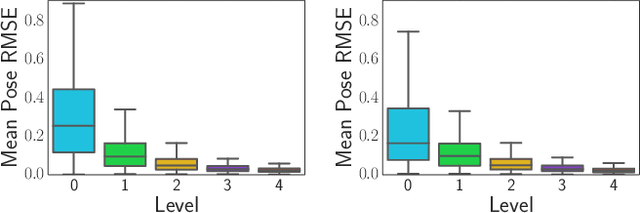
We present an unsupervised deep neural network approach to the fusion of RGB-D imagery with inertial measurements for absolute trajectory estimation. Our network, dubbed the Visual-Inertial-Odometry Learner (VIOLearner), learns to perform visual-inertial odometry (VIO) without inertial measurement unit (IMU) intrinsic parameters (corresponding to gyroscope and accelerometer bias or white noise) or the extrinsic calibration between an IMU and camera. The network learns to integrate IMU measurements and generate hypothesis trajectories which are then corrected online according to the Jacobians of scaled image projection errors with respect to a spatial grid of pixel coordinates. We evaluate our network against state-of-the-art (SOA) visual-inertial odometry, visual odometry, and visual simultaneous localization and mapping (VSLAM) approaches on the KITTI Odometry dataset and demonstrate competitive odometry performance.
DTM: Deformable Template Matching
Apr 12, 2016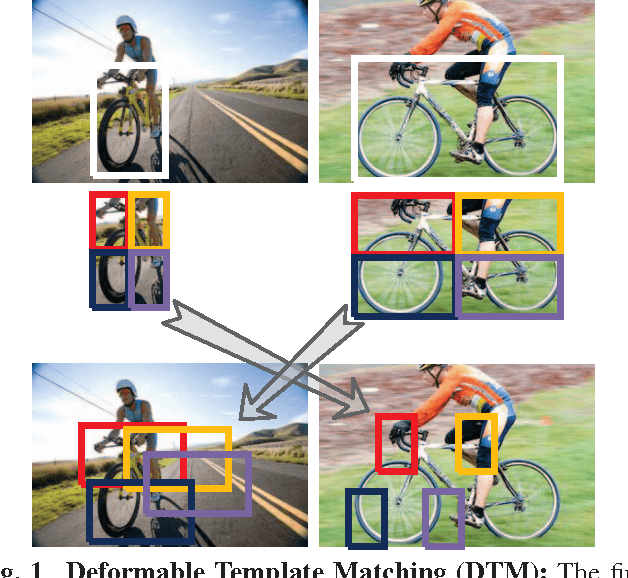
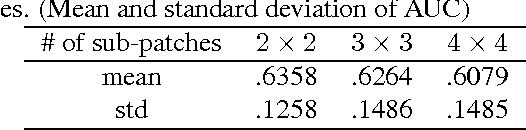
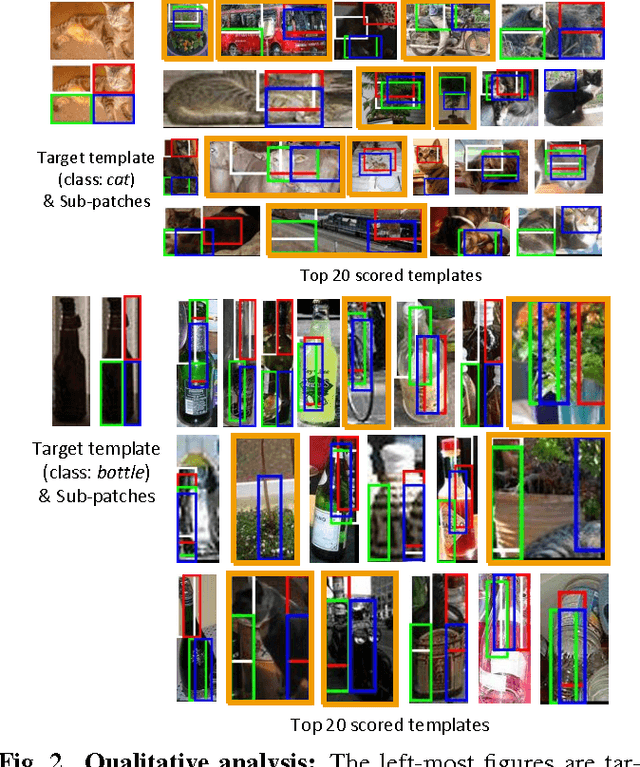
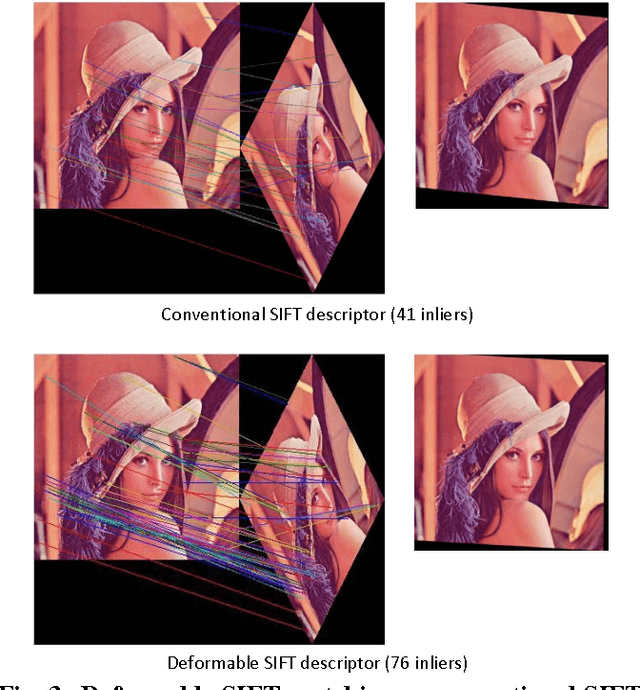
A novel template matching algorithm that can incorporate the concept of deformable parts, is presented in this paper. Unlike the deformable part model (DPM) employed in object recognition, the proposed template-matching approach called Deformable Template Matching (DTM) does not require a training step. Instead, deformation is achieved by a set of predefined basic rules (e.g. the left sub-patch cannot pass across the right patch). Experimental evaluation of this new method using the PASCAL VOC 07 dataset demonstrated substantial performance improvement over conventional template matching algorithms. Additionally, to confirm the applicability of DTM, the concept is applied to the generation of a rotation-invariant SIFT descriptor. Experimental evaluation employing deformable matching of SIFT features shows an increased number of matching features compared to a conventional SIFT matching.
Fast Object Localization Using a CNN Feature Map Based Multi-Scale Search
Apr 12, 2016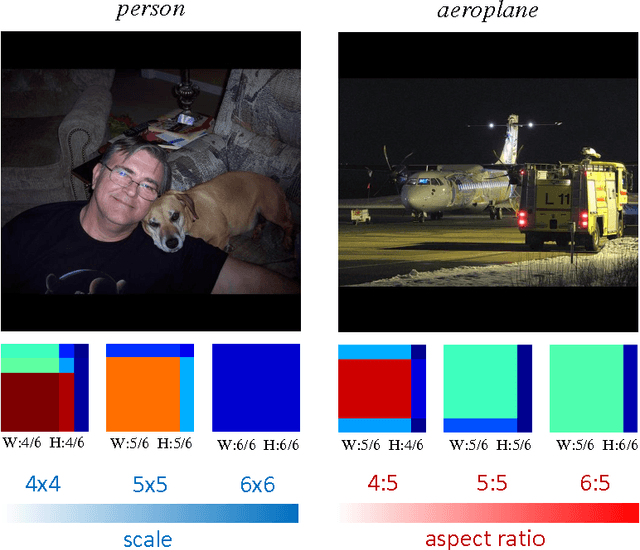
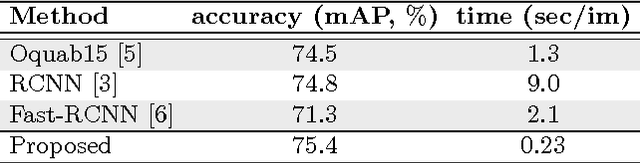
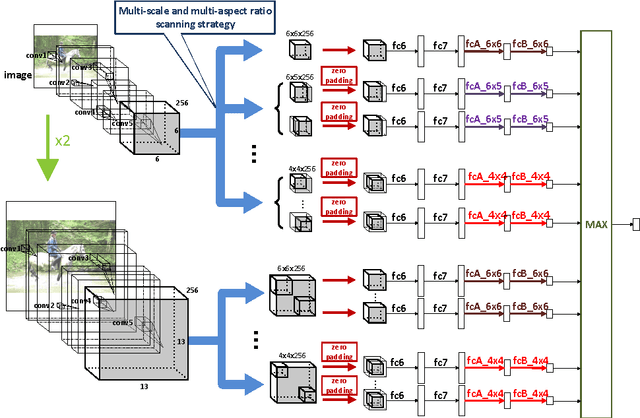
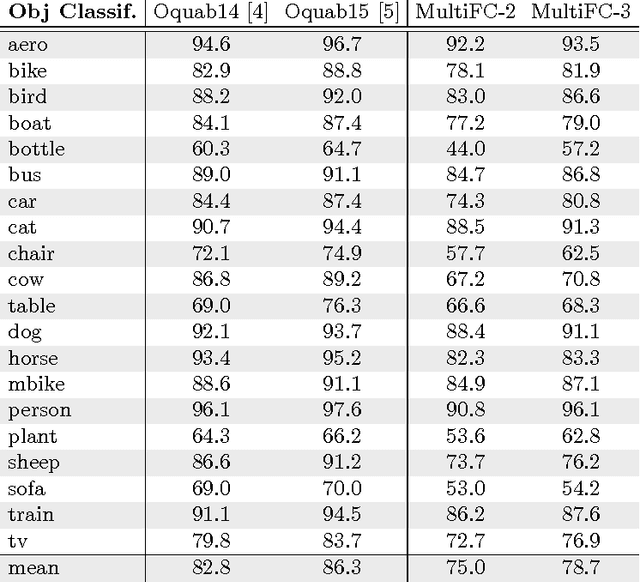
Object localization is an important task in computer vision but requires a large amount of computational power due mainly to an exhaustive multiscale search on the input image. In this paper, we describe a near real-time multiscale search on a deep CNN feature map that does not use region proposals. The proposed approach effectively exploits local semantic information preserved in the feature map of the outermost convolutional layer. A multi-scale search is performed on the feature map by processing all the sub-regions of different sizes using separate expert units of fully connected layers. Each expert unit receives as input local semantic features only from the corresponding sub-regions of a specific geometric shape. Therefore, it contains more nearly optimal parameters tailored to the corresponding shape. This multi-scale and multi-aspect ratio scanning strategy can effectively localize a potential object of an arbitrary size. The proposed approach is fast and able to localize objects of interest with a frame rate of 4 fps while providing improved detection performance over the state-of-the art on the PASCAL VOC 12 and MSCOCO data sets.