 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDTM: Deformable Template Matching
Apr 12, 2016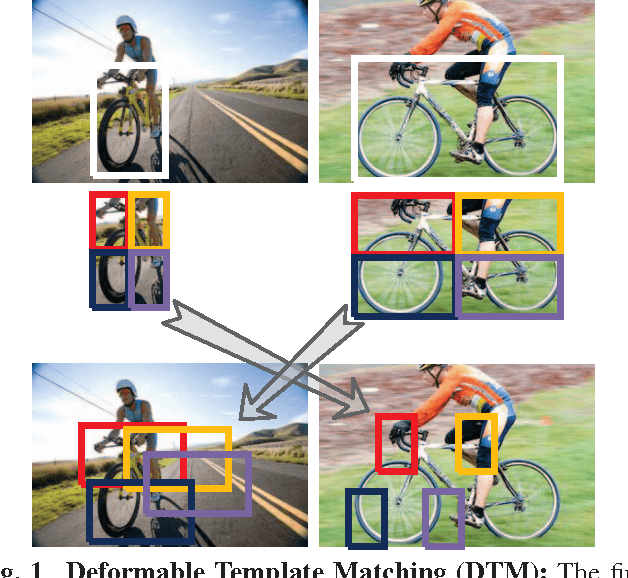
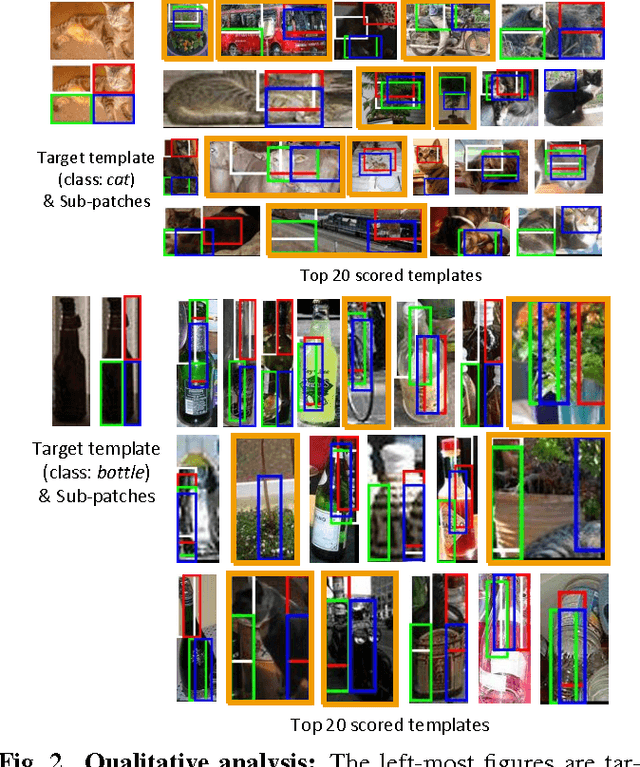
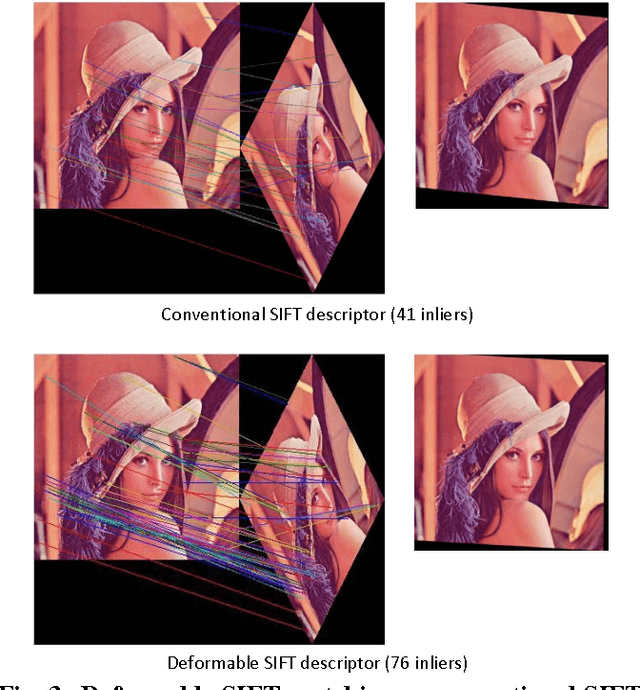
A novel template matching algorithm that can incorporate the concept of deformable parts, is presented in this paper. Unlike the deformable part model (DPM) employed in object recognition, the proposed template-matching approach called Deformable Template Matching (DTM) does not require a training step. Instead, deformation is achieved by a set of predefined basic rules (e.g. the left sub-patch cannot pass across the right patch). Experimental evaluation of this new method using the PASCAL VOC 07 dataset demonstrated substantial performance improvement over conventional template matching algorithms. Additionally, to confirm the applicability of DTM, the concept is applied to the generation of a rotation-invariant SIFT descriptor. Experimental evaluation employing deformable matching of SIFT features shows an increased number of matching features compared to a conventional SIFT matching.
Dynamic Belief Fusion for Object Detection
Nov 10, 2015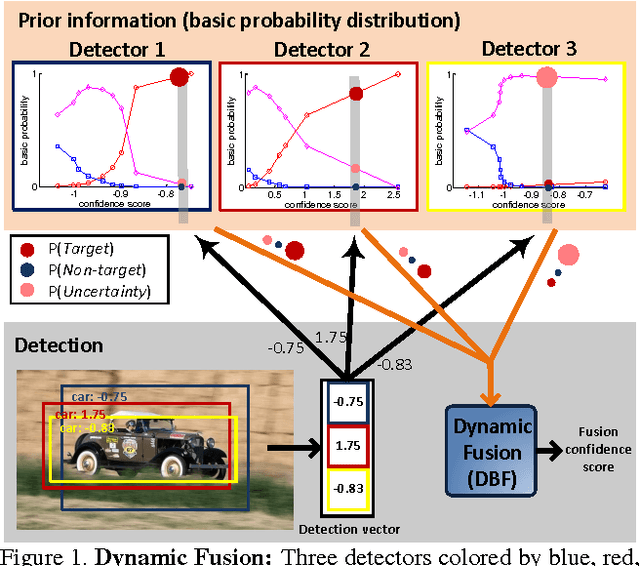
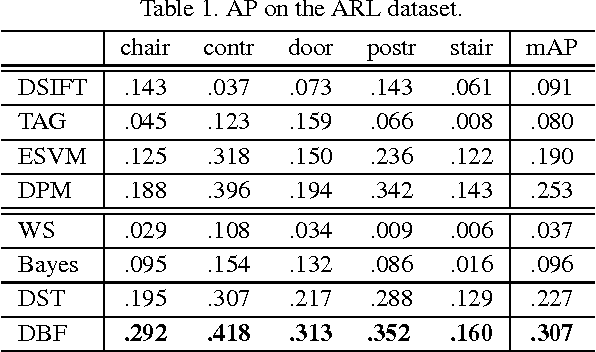


A novel approach for the fusion of heterogeneous object detection methods is proposed. In order to effectively integrate the outputs of multiple detectors, the level of ambiguity in each individual detection score is estimated using the precision/recall relationship of the corresponding detector. The main contribution of the proposed work is a novel fusion method, called Dynamic Belief Fusion (DBF), which dynamically assigns probabilities to hypotheses (target, non-target, intermediate state (target or non-target)) based on confidence levels in the detection results conditioned on the prior performance of individual detectors. In DBF, a joint basic probability assignment, optimally fusing information from all detectors, is determined by the Dempster's combination rule, and is easily reduced to a single fused detection score. Experiments on ARL and PASCAL VOC 07 datasets demonstrate that the detection accuracy of DBF is considerably greater than conventional fusion approaches as well as individual detectors used for the fusion.